

使用Ouster SDK可以更快地构建
强大的工具用于构建先进的感知软件
请访问Ouster SDK文档以了解更多信息Ouster and ROS 2
Ouster’s driver for ROS 2 simplifies the use of lidar sensors and captured lidar data. A short webinar and Q&A will offer insights from Ouster's engineering team on how to take full advantage of the driver.
快速链接
样本数据
研究驱动的项目的有用样本数据。
轻松可视化激光雷达点云。
使用一行代码,pip安装Ouster传感器SDK,即可将原始数据转换为点云。我们的SDK配备了预建命令,以加快激光雷达开发过程。

通过硬件统一,通过软件多样化。
基于Ouster的数字激光雷达技术,传感器比其他激光雷达传感器更可靠、分辨率更高、成本更低。我们提供了一个灵活的平台,可以通过软件单独升级新的功能和应用程序,包括能够检测不同的物体和事件、配置自定义区域,并收集精确的度量数据,如计数、速度和停留时间。现在只需一个传感器就可以解锁多种传统感知技术的检测能力。


使用开源的跨平台SDK可以简单地进行集成。
Ouster SDK使开发者能够在任何平台上使用Python或C++构建应用,并使用他们喜欢的库更高效地进行原型设计、开发和维护应用程序。
Linux x86_64/ARM
MacOS x86_64/M1
Windows x86_64

更多资源
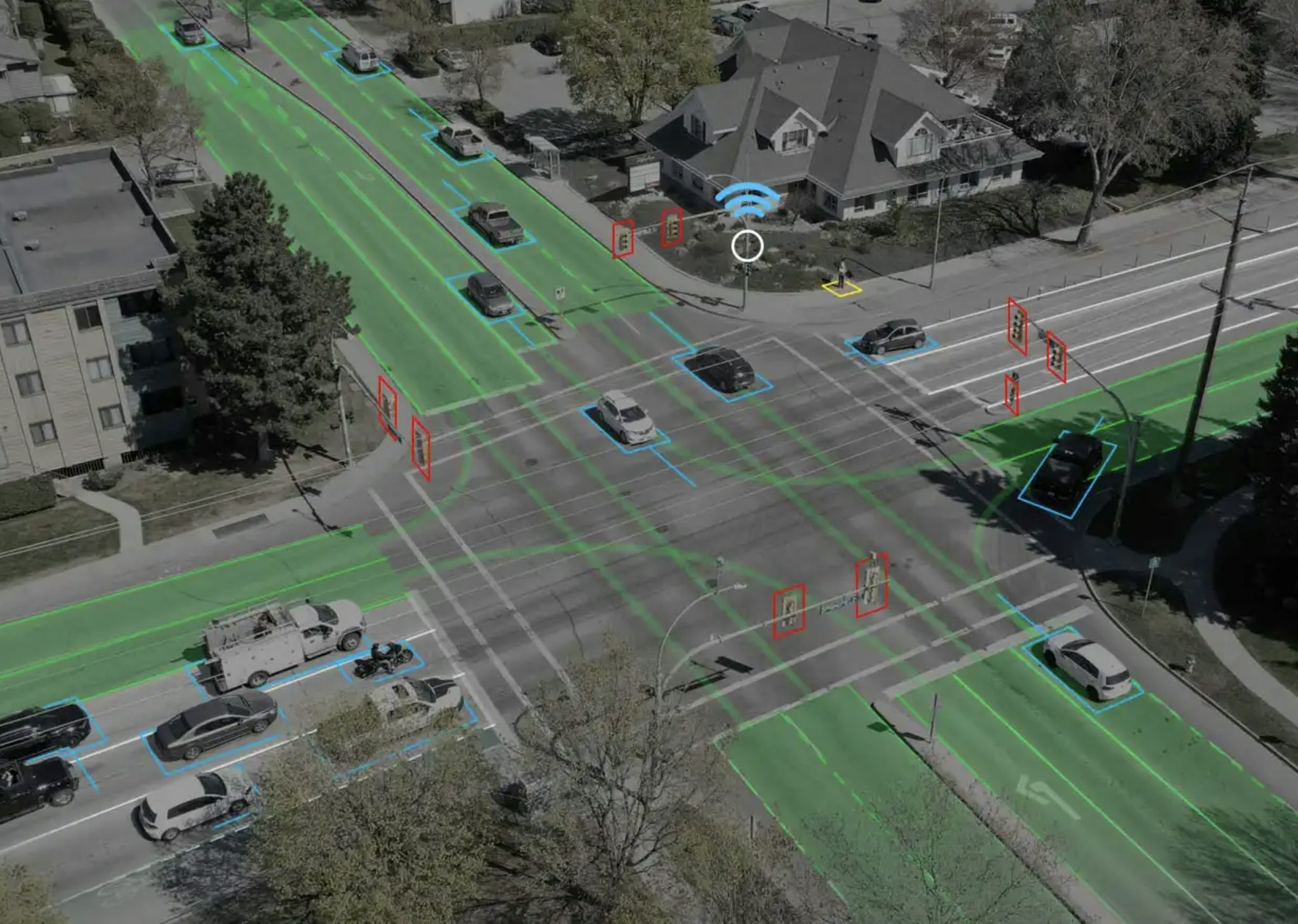
The ultimate ITS sensor showdown: lidar vs. camera vs. radar
It can be a daunting task for traffic engineers and city planners to choose the right sensor for their application. In this blog, we dissect the use of three sensor technologies for roadway safety and efficiency to simplify the decision.

Enhancing Warehouse Safety and Efficiency with Balyo and Ouster
Safety is the focal point of Balyo’s material handling automation business. Their latest platform helps warehousing and logistics companies enhance the safety of their operations and increase efficiency by increasing the object awareness of automated vehicles.

Forest Biodiversity Powered by Three Dimensional Deep Learning and the Ouster OS0
Deep Forestry has built a push-button autonomous survey drone, powered by Ouster lidar, for dense cluttered environments such as industrial buildings, warehouses, or underground tunnels.
The ultimate ITS sensor showdown: lidar vs. camera vs. radar
It can be a daunting task for traffic engineers and city planners to choose the right sensor for their application. In this blog, we dissect the use of three sensor technologies for roadway safety and efficiency to simplify the decision.
Enhancing Warehouse Safety and Efficiency with Balyo and Ouster
Safety is the focal point of Balyo’s material handling automation business. Their latest platform helps warehousing and logistics companies enhance the safety of their operations and increase efficiency by increasing the object awareness of automated vehicles.
Forest Biodiversity Powered by Three Dimensional Deep Learning and the Ouster OS0
Deep Forestry has built a push-button autonomous survey drone, powered by Ouster lidar, for dense cluttered environments such as industrial buildings, warehouses, or underground tunnels.