We are proud to announce the release of Firmware 3.1 for Rev7 sensors. We first released our Rev7 sensors nearly 18 months ago, doubling sensor range, greatly improving precision, and adding the OSDome to our product lineup. Firmware 3.1 builds on the major performance improvements of Rev7 with: reduced minimum range, improved accuracy, improved point cloud performance with obscurants (rain, dust, fog, and snow), as well as many usability and feature additions. Firmware 3.1 is available on all Rev7 OSDome’s, OS0’s, and OS1’s
Minimum range of ZERO
We are proud to announce the release of Firmware 3.1 for Rev7 sensors. We first released our Rev7 sensors nearly 18 months ago, doubling sensor range, greatly improving precision, and adding the OSDome to our product lineup. Firmware 3.1 builds on the major performance improvements of Rev7 with: reduced minimum range, improved accuracy, improved point cloud performance with obscurants (rain, dust, fog, and snow), as well as many usability and feature additions. Firmware 3.1 is available on all Rev7 OSDome’s, OS0’s, and OS1’s

Minimum range of ZERO
We are proud to announce the release of Firmware 3.1 for Rev7 sensors. We first released our Rev7 sensors nearly 18 months ago, doubling sensor range, greatly improving precision, and adding the OSDome to our product lineup. Firmware 3.1 builds on the major performance improvements of Rev7 with: reduced minimum range, improved accuracy, improved point cloud performance with obscurants (rain, dust, fog, and snow), as well as many usability and feature additions. Firmware 3.1 is available on all Rev7 OSDome’s, OS0’s, and OS1’s
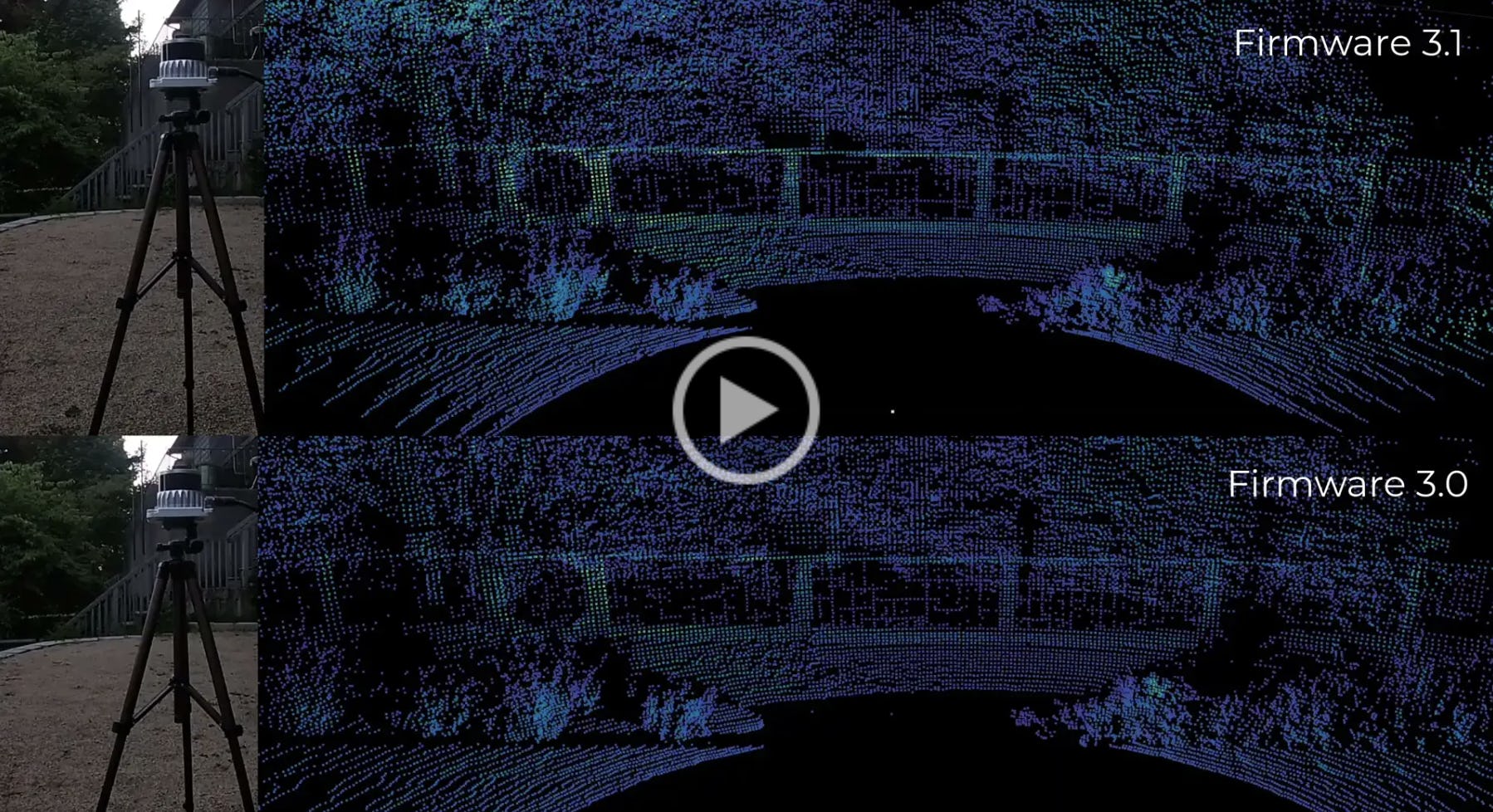
We will follow up with a slightly longer post on this topic, but as a preview, we also took a sensor on FW3.1 for a drive in the rain. Here’s a comparison of the lidar performance vs. a camera on the drive:

We will follow up with a slightly longer post on this topic, but as a preview, we also took a sensor on FW3.1 for a drive in the rain. Here’s a comparison of the lidar performance vs. a camera on the drive:
Additional Features:
Return Sorting
In FW3.1, we have added a few features to make the sensor easier to use. The most significant of these new features is a new return ordering capability. All Rev7 sensors have the ability to collect up to a maximum of returns for each point. Now, in the Sensor Web Interface, you can configure the order of returns. By default, in dual return mode, Ouster sensors will send the strongest and second strongest returns, meaning in the path of the laser, the two objects that reflect the most light will be returned by the sensor. In single return mode, the strongest return is selected by default
You will now have three options for ordering these returns:
Strongest to Weakest (whichever of the two returns reflected more light will be the ‘first’ return)
Nearest to Farthest (whichever of the two returns is closer to the sensor will be the ‘first’ return)
Farthest to Nearest (whichever of the two returns is farthest from the sensor will be the ‘first’ return)
These options are visualized here:

In addition to Return Ordering, we have three additional areas of feature improvement in FW3.1. They are:
FuSa low data rate dual return packet. This offers users the ability to use dual return data in a low data rate mode.
Improved data integrity with End-to-end CRC that covers the entire data packet.
User Integration improvements with alert flags in the data packet, a new customizable data field, and configurable scale for the IMU.
Firmware 3.1 is a major firmware improvement to our sensors. You can read more about the technical details of these features in our Changelog and in the Firmware Feature Guides.
We would like to remind our customers that TCP commands to the sensor will be fully deprecated in future Firmware releases and to please transition to the HTTP API as soon as possible.
We strongly encourage all Rev7 customers to upgrade their sensors to Firmware 3.1 as soon as possible to get the highest performance possible out of their sensors.