Ouster BlueCity to be deployed at 42 urban highway locations covering mainline and ramps close to the MetLife Stadium The deployments are part of New Jersey Department of Transportation’s (NJDOT) project representing the largest and fastest Intelligent Transportation System (ITS) deployment in the State’s history.NJDOT’s project integrates Ouster BlueCity into the statewide Advanced Traffic Management System (ATMS) for enhanced mobility and safety.
Ouster BlueCity to be deployed at 100+ additional intersections and roadways throughout NashvilleExpansion follows successful pilot in north Nashville area and multi-intersection deployment on Broadway for corridor-level analytics and traffic management intelligence
Defining a New Era of Durability in ITS. Traditional ITS sensors fail in rain, glare, and snow. Ouster BlueCity uses proven digital lidar to maintain reliable performance at smart intersections 24/7.
A new generation of Ouster digital lidar, powered by custom L4 Ouster Silicon. Rev8 introduces native color lidar, provides up to double the range and resolution, and is designed for functional safety, reliability, affordability, and scale.
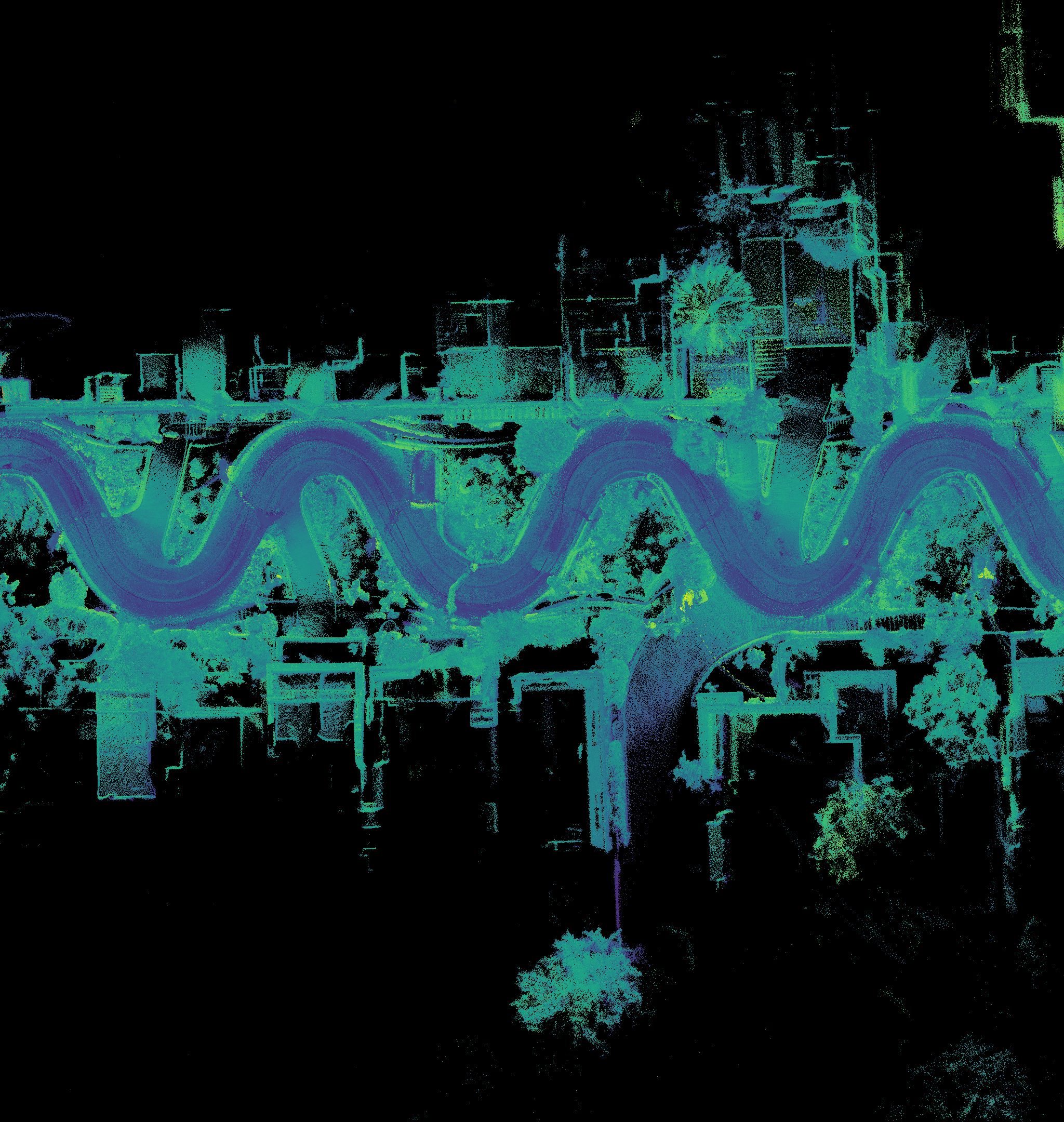
Researchers at Freie Universität Berlin are changing a storage paradigm for autonomous navigation. By using Ouster OS2 digital lidar to create ultra-lightweight bird's-eye-view maps, the team achieved sub-50cm localization accuracy with a map footprint of just 4 MB per square kilometer.
From Canadian roots to global leadership, Ouster BlueCity is modernizing the intelligent transportation sector. Learn how BlueCity started, grew at Velodyne and further at Ouster into what it is today.
Researchers at Inha University are improving lidar performance degradation in extreme weather with LIORNet (a self-supervised U-Net++ architecture) and Ouster digital lidar. They achieve a 96% snow removal rate while preserving critical urban structures in real-time.
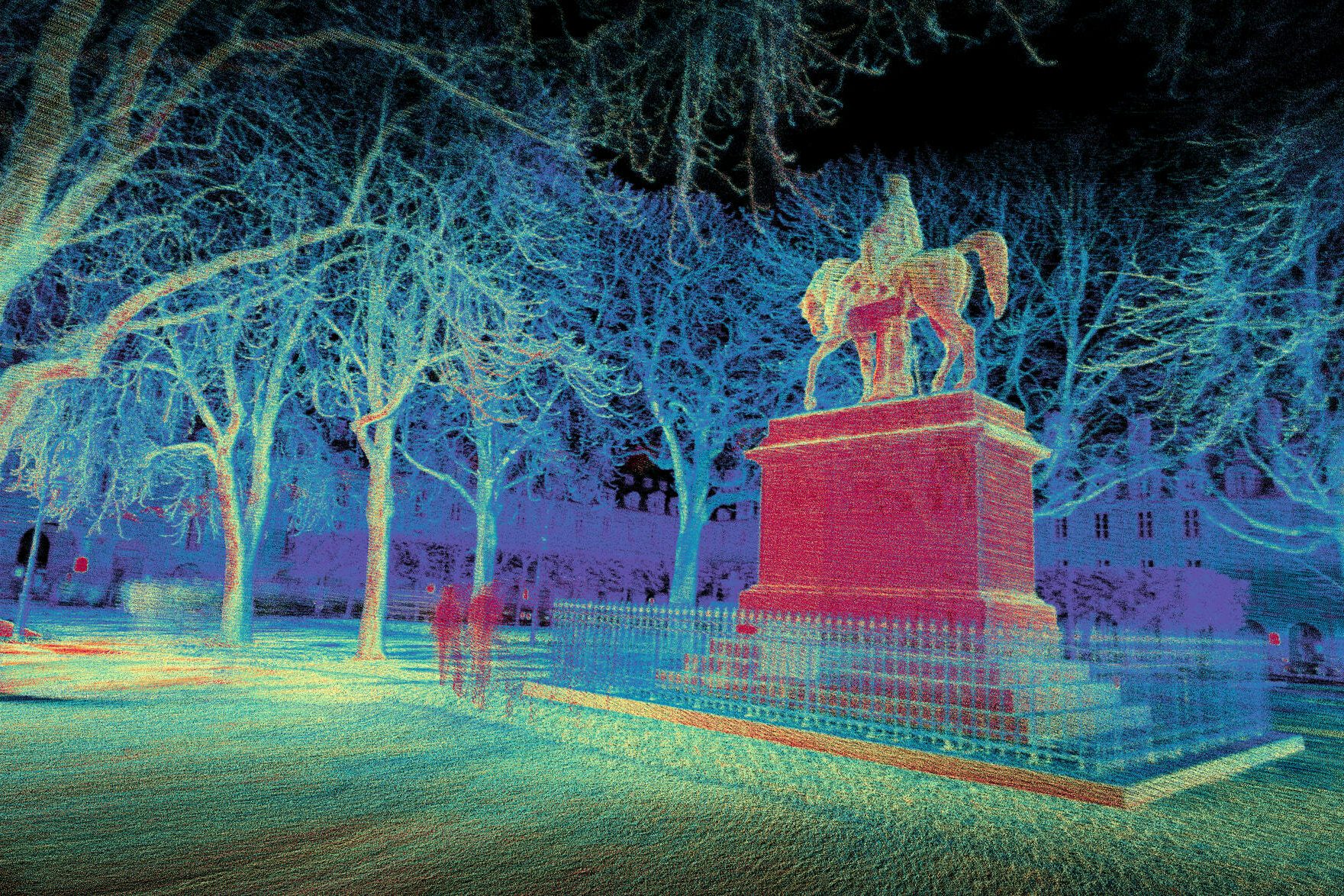
Researchers at the Royal Institute of Technology in Stockholm are solving dynamic SLAM with Transitional Grid Maps (TGMs). By using Ouster OS1 digital lidar to model static and dynamic occupancy, the team eliminated map "ghosting" in busy traffic.
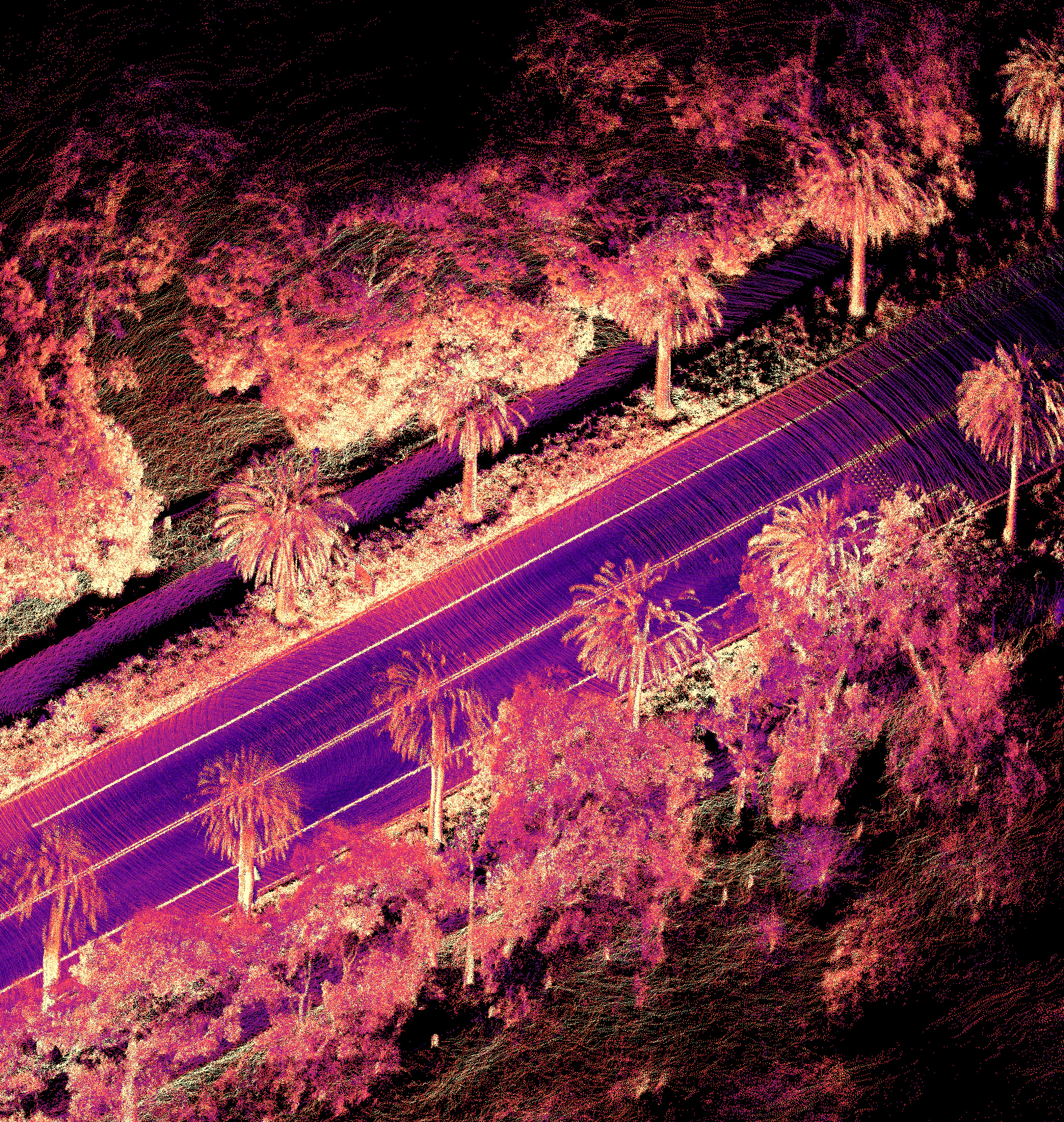
Learn how to achieve "crisp" 3D lidar maps using Ouster’s REV7 OS1 and firmware 3.2. This guide covers optimal SLAM configurations, beam collimation benefits, and ouster-cli commands for voxel sizing and reflectivity filtering to maximize spatial accuracy
Technical University of Munich’s EDGAR platform uses Ouster digital lidar and an open-source digital twin to bridge the sim-to-real gap across x86 and ARM architectures, accelerating the path to production for Physical AI.
Physical AI is driving traffic innovation in 2026. Learn about lidar-powered signal optimization, proactive safety analytics, and city-wide V2X integration.
August 25th - 28th in Atlanta, Georgia