

TUM: Bridging the Sim-to-Real Gap with Digital Twins and Digital Lidar
Technical University of Munich’s EDGAR platform uses Ouster digital lidar and an open-source digital twin to bridge the sim-to-real gap across x86 and ARM architectures, accelerating the path to production for Physical AI.
Most autonomous driving begins on a screen. In a perfect, simulated world, algorithms are refined, paths are planned, and edge cases are tested without a single drop of fuel or a safety driver behind the wheel.
Perception engineering comes with the challenge of transitioning from simulation to the road. All too often, code that performs flawlessly in a virtual environment begins to struggle when it meets the messiness of the real world. This is called the "Sim-to-Real" gap - a hurdle that has historically slowed down development and introduced unnecessary risk.
To solve this, the team at the Technical University of Munich (TUM) introduced EDGAR (Excellent Driving Garching). EDGAR is a holistic research platform that connects a physical car to a 1:1 Digital Twin, enabling faster iteration cycles for autonomous vehicle research.
By standardizing their perception layer with Ouster digital lidar and collaborating with our premium DACH partner, General Laser, the TUM team has built a bridge that allows researchers to move from simulation to the asphalt with more confidence.
The Challenge: When Simulation and Reality Don't Match
The Sim-to-Real gap usually comes down to inconsistency. If your simulated sensor perceives the world differently than your physical sensor, your software will struggle to adapt.
Legacy analog lidar sensors are notoriously difficult to model. They often have inconsistent noise profiles and vary from unit to unit. When you combine that with the leap from high-powered development servers to the ARM-based embedded computers actually inside the vehicle, the validation process becomes a bottleneck.
The EDGAR project was designed to eliminate these variables by ensuring that every part of the stack, from the network latency to the 3D data, is identical in both the virtual and physical worlds.
To achieve this level of consistency, the TUM team integrated Ouster OS1-128 sensors into the EDGAR platform.
Choosing a digital architecture was a strategic move. Because Ouster sensors are built on a simplified, CMOS-based digital design, they are inherently deterministic. The data is structured, the noise is predictable, and the resolution is consistent. This makes creating a "Digital Twin" of the sensor much more accurate than with legacy analog tech.
The Solution: How EDGAR leverages Ouster’s digital lidar
- 128 Channels of Clarity: The OS1-128 delivers camera-like resolution that allows the system to identify fine details, like a cyclist’s hand signal or the height of a curb, in both the real world and the Digital Twin.
- Eliminating Blind Spots: Urban driving in cities like Munich is tight and unpredictable. The team strategically mounted two OS1 sensors to ensure a full 360° field of view with dense reflections in the mid-range, where pedestrians and obstacles are most likely to appear.
- Hardware-in-the-Loop (HiL) Optimization: By using Ouster’s pre-built ROS 2 drivers, the team was able to test software performance across both x86 and ARM architectures (InoNet and ADLINK), ensuring that their software wasn't just smart, but fast enough to run on embedded hardware.
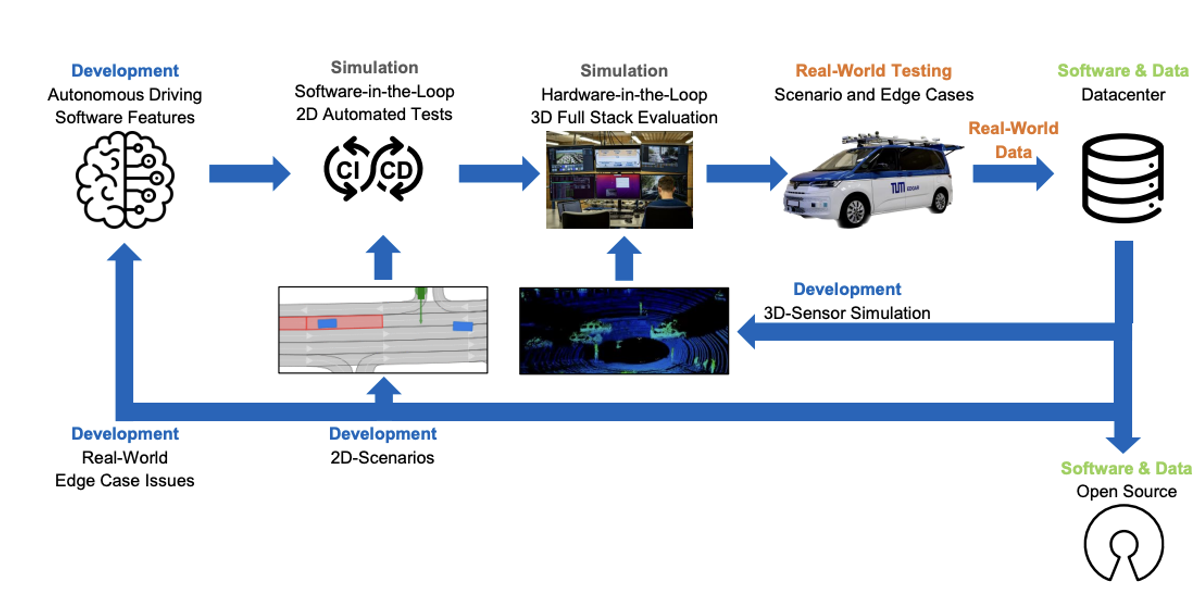
Development workflow of EDGAR
The Outcome: World-Positive Open Source
At Ouster, we believe that the best developer support requires participating in and engaging with the developer community.
TUM has taken it one step further and open-sourced the EDGAR Digital Twin. This means that researchers worldwide can now work with the same detailed vehicle models and sensor configurations used by one of the world's leading technical universities.
Supported by the local technical expertise of General Laser, EDGAR is a prime example of what happens when you prioritize quality over noise. It’s a platform built for researchers, by researchers, and it’s setting a new standard for how autonomous systems are validated.
Read more about their research here.
Accelerate Your Research
We are proud to support the next generation of breakthroughs in autonomy and perception. University labs and research institutions can access exclusive, pre-approved pricing on our full suite of digital lidar sensors. Reach out to our team about your use case and we can work together to find an appropriate fit.