

Wide field of view lidar sensors are the newest and fastest growing segment of the lidar market. We began work on our wide-view OS0 more than 18 months ago, in collaboration with a major global automotive OEM partner, to build a product that could satisfy the specific needs of many types of customers: autonomous vehicles, robotics, and mapping.
Working with our partner and customers, we identified three attributes (in addition to a wide field of view) that are critical for our customers’ applications: high resolution for object detection, 25 centimeter minimum range for maneuvering in close quarters, and high precision for 3D mapping.
The OS0 delivers on all fronts: a 90º vertical field of view, up to 2.6 million points per second (MPS) of resolution, a 0 cm minimum range, and up to millimeter level precision. For customers in AVs, robotics, and mapping who require high performance, the OS0 is the wide-view sensor of choice.
In addition to the wide field of view, the OS0 features a range of 50 m for 80% reflective targets and 15 m for 10% reflective targets. Range is not the defining feature of the wide-view sensor market, but the OS0’s 50 m range is critical for the sensor to be effective as a near-range sensor on an autonomous vehicle, or as the only sensor on a slower-speed robot.
In this post, we’re going to go deeper into each of these key performance characteristics, explain what they mean for our customers working on perception, localization, and mapping, and demonstrate some of the ways the OS0 is the highest performance wide-view lidar sensor available today.
The OS0: The highest performance wide-view lidar sensor
The four key features of the OS0 are:
- The 90º wide vertical field of view
- 128 channels of resolution
- 25 cm minimum range
- Millimeter level precision
The 90° wide vertical field of view
The OS0 provides a wide vertical field of view of 90º for classifying objects at close ranges, improving localization algorithms and speeding up indoor 3D mapping.
For robotics applications, the 90º field of view can be used to see entire shelving units in a warehouse as well as allow the sensor to capture additional unique features for improved localization.
See the full video of the warehouse here:
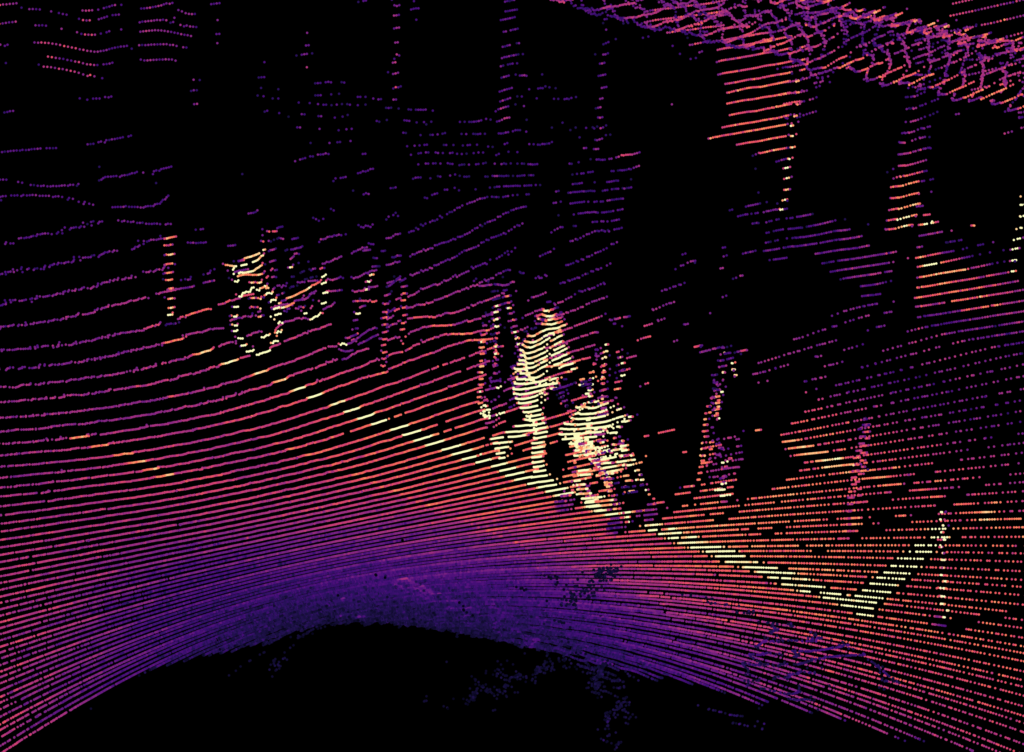
For autonomous vehicles, the wide view of the OS0 captures a head-to-toe image of a fully grown adult as close as 1 meter from the vehicle. When placed properly, a set of OS0s can provide full visibility around all four sides of a vehicle—ensuring the vehicle can see children and small pets, as well as curbs and cones.
Check out this video of a simulated autonomous taxi curbside pickup from a supermarket:
For localization specifically, the OS0 is able to capture up to 3 stories high on buildings that line the street. This visibility provides more unique features to localization algorithms, enhancing localization speed and accuracy.
For indoor mapping, the OS0’s wide field of view allows for greater coverage of a space with fewer required rotations or scanning passes. This extra coverage reduces the time spent mapping while delivering the high precision and accuracy required for 3D mapping.
128 channels of resolution
Ouster’s digital lidar technology allows us to increase the resolution of our sensors without changing form factor, weight, or power draw. Our second generation sensors, released this January, give the OS0, OS1, and OS2 up to 128 channels of resolution, without changing the form factor from our first generation 64-channel sensors.
Watch our webinar on how high resolution is measured here.
Higher resolution is the single feature that is most meaningful in moving lidar from a simple obstacle avoidance technology and into mainstream use as an object detection, segmentation and classification sensor. The high resolution capabilities of digital lidar are one of the many reasons that led Apple to choose the technology for their new iPad Pros.
“At 2.6 MPS (million points per second) the OS0 has more than five times the resolution of other available short range sensors.”
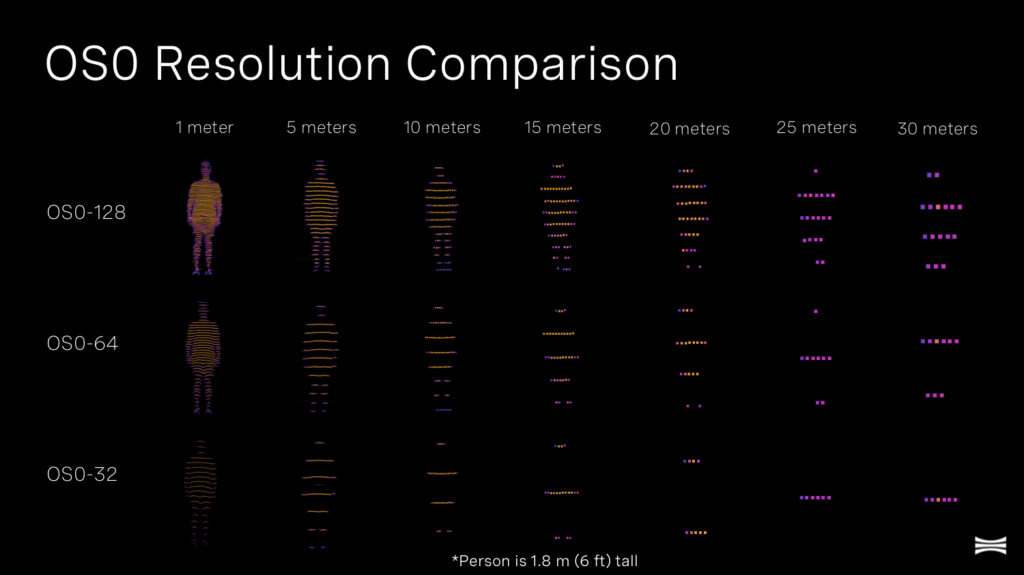
In the wide-view sensor market, current state-of-the-art analog spinning sensors support up to 64 beams of vertical resolution, and the new OS0 doubles this standard with 128 vertical beams. With double the vertical resolution, algorithms gain the ability to segment and classify objects at much longer ranges, and with higher confidence at all distances within the sensor’s range. At 2.6 MPS (million points per second), the OS0 has more than five times the resolution of other available short range sensors.
To better understand this, let’s consider that current standard detection algorithms require approximately 4 horizontal lines of data on a person for them to be accurately classified. We use a concept called “effective range” to describe the range at which a person can be accurately classified. With 64 channels and a 90º vertical FoV, the sensor has an effective range of 20 m. With the higher resolution of an OS0-128 the effective range is 50% longer, out to 30 m. You can see this illustrated in the graphic below.
For a real world example, imagine an autonomous shuttle traveling 40 kilometers per hour (~25 mph). This shuttle is moving about 10 meters per second and at that speed has a stopping distance of approximately 15 meters. This means that using a 64 channel sensor, the autonomous shuttle will have 0.5 seconds to identify a pedestrian and begin braking (20 meters of effective range = 5 meters to identify, 15 meters to brake).
With a 128 channel sensor, the shuttle will have three times as long to react: 30 meters of effective range = 15 meters (1.5 seconds) to identify, and 15 meters to brake.
Finally, the high resolution of the OS0-128 allows for much smaller objects to be captured by the sensor. In the image below, you can see a range of objects. From left to right we have a tennis ball, a small cone, an American football, a tire, a cone, and a garbage can. The sensor is able to clearly pick up even the tennis ball at a range of 2 meters.
25-centimeter minimum range
The OS0 features a minimum range of 25 cm for close range detection. The OS0 achieves this by returning point cloud data for all objects as close as 25 cm to the sensor, and with a future firmware update, we intend to add a blockage detection flag for objects within 25 cm of the sensor. When this feature gets rolled out, this means that within 25 cm of the sensor the OS0 returns a flag to indicate the presence of an object closer than 25 cm (the flag is not visually represented in the point cloud).
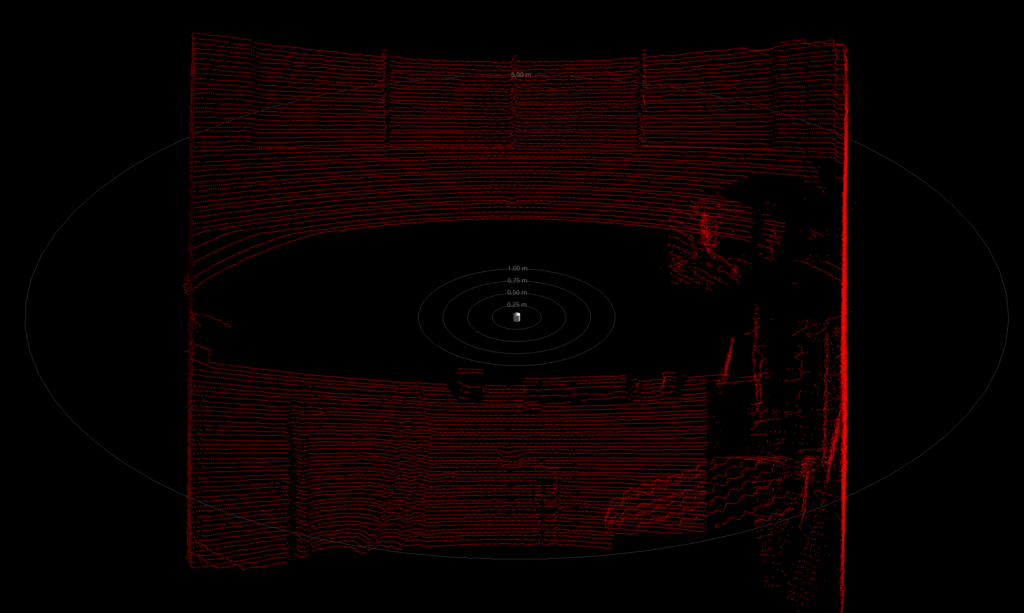
We took the OS0 to our empty parking lot to demonstrate visually what this means. In the video below, the OS0 captures data up to the 25 cm minimum range, and even at 40 cm, the sensor can clearly make out the spaces between fingers of an open hand. With this near range high-resolution, the OS0 can identify small objects in a warehouse or on the road.
Watch the video here:
Millimeter-level precision
We put all of our sensors through a battery of tests, including a range and precision tests to ensure every sensor meets its stated specifications. The precision of a lidar sensor varies over the range of the sensor, which we will explain in more detail in our upcoming webinar.
In short, a sensor follows a curve that is shaped like a Nike swoosh. The precision near the minimum range of a sensor is slightly worse, due to an effect that is similar to how objects on your nose appear blurry until you move them farther away from your face. As a target moves away from the minimum range, precision improves up to a point, and then again begins to steadily decline out to the maximum range of the sensor.

We demonstrate the precision of the OS0 here on a 10% target over a 25 m range. As you will see on the table below, the sensor achieves precision of ± 0.5 cm at a range of <1 m, and that precision decreases up to ±1 cm at a range of 1 meter. As the target moves beyond 1 m away from the sensor, precision improves to ±0.9 cm for ranges between 1 – 10 m. Beyond 10 m, precision decays geometrically out to a maximum of ±5 cm at 25 m.
OS0 Precision for a 10% reflective target:
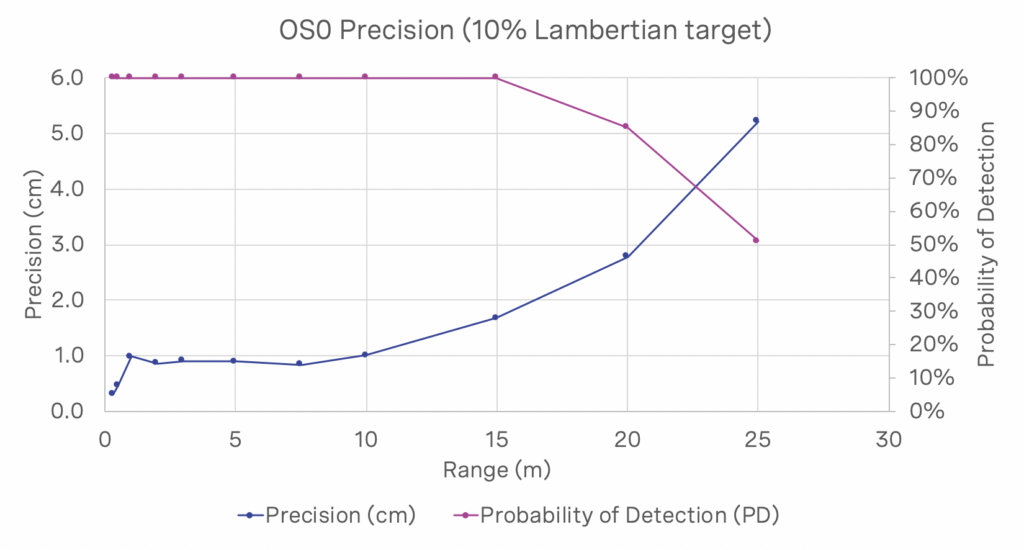
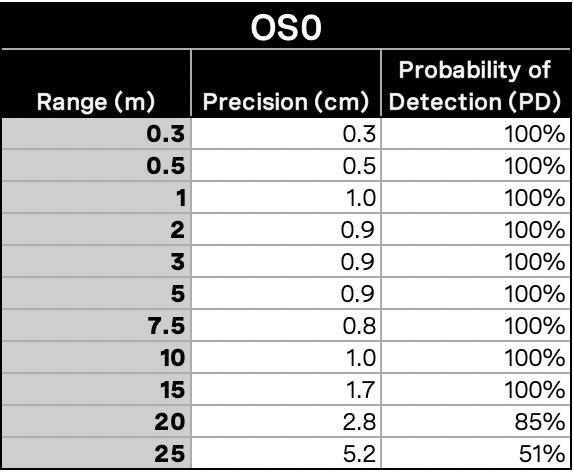
This millimeter level precision is the highest level of precision available on the market today, making the OS0 an ideal sensor for indoor mapping.
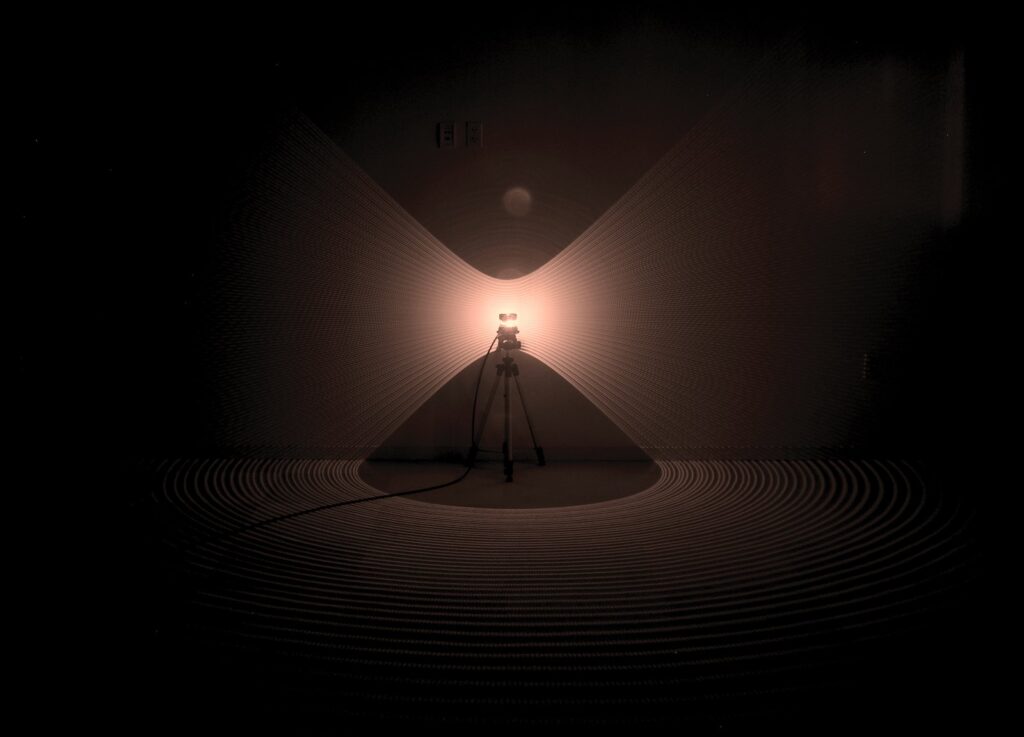
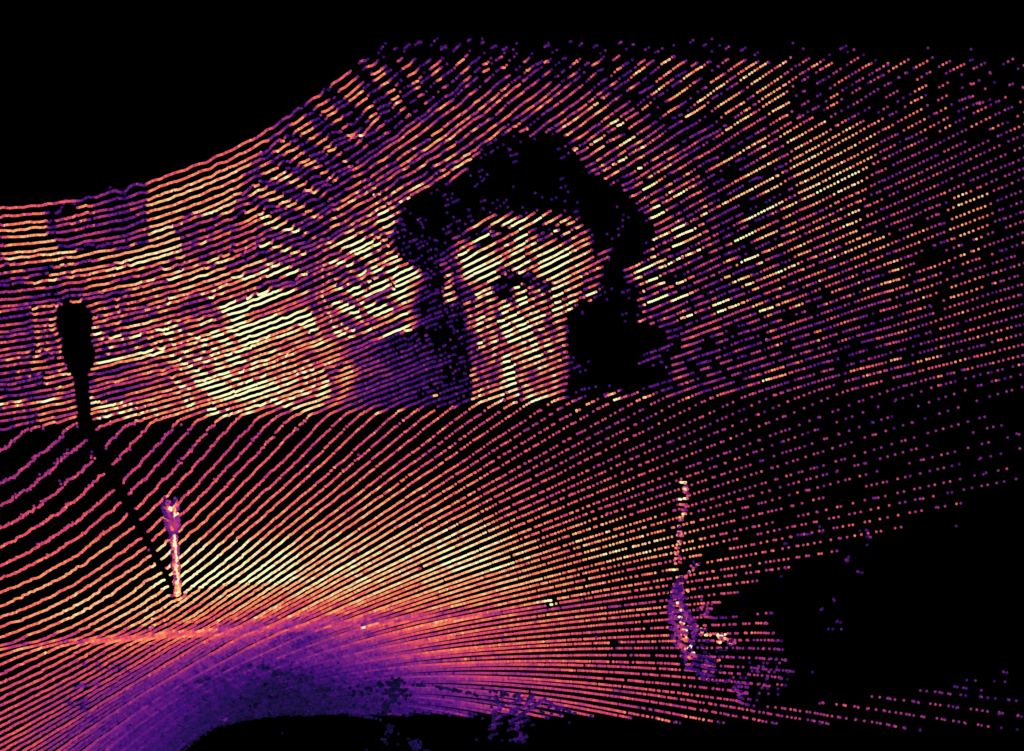
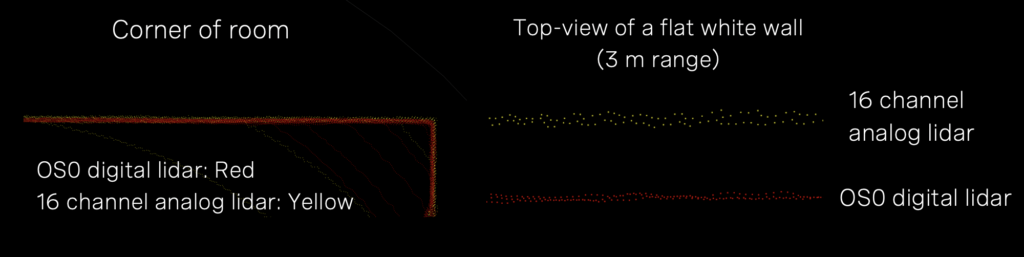
As a more practical demonstration, we also put our sensors through what we call the “Four Walls Test.” In this test, we put the sensor in the center of a room, and qualitatively compare the thickness of the walls between other sensors. The more precise the sensor is, the “thinner” the walls appear.
We also test for linearity and any distortion or “bend” in the walls. In the images below, you can see how the walls captured by the OS0 have a thinner profile than the leading mid-range 16 channel analog sensor on the market.
See the OS0 for yourself
With its wide vertical field of view, 128 channel resolution, 0 cm minimum range, and millimeter level precision, it’s safe to say that the OS0 is the most capable short range sensor available. In addition to its high performance, this sensor’s small form factor and light weight of 445 grams make it easy to seamlessly integrate into an autonomous vehicle, warehouse robot, or indoor mapping rig. To take a deeper dive into the OS0 in nearly all the available configurations, take a look at the sample data and a series of videos below.
Click here for downloads of OS0 sample data for the OS0-128, OS0-64 Uniform, OS0-64 Gradient, OS0-32 Uniform, and OS0-32 Gradient.
Please reach out to our team of experts to learn more and get your hands on the OS0!
Here are videos of those configurations:
OS0-128
OS0-64 Uniform
OS0-64 Gradient
OS0-32 Uniform
OS0-32 Gradient
Related Articles

Privacy by Design: How Ouster BlueCity Fuses Native Color Lidar with Edge Privacy
Ouster BlueCity with Rev8 is the industry's first native color lidar detection system, giving traffic engineers up to 500 feet of advance detection and richer situational awareness at intersections. Its edge-processed AI, running on NVIDIA Orin AGX and trained on 4 million labeled objects across 800 sites, delivers 99% stop bar detection accuracy while automatically blurring pedestrians and cyclists to protect identity.

NJDOT
Ouster BlueCity to be deployed at 42 urban highway locations covering mainline and ramps close to the MetLife Stadium The deployments are part of New Jersey Department of Transportation’s (NJDOT) project representing the largest and fastest Intelligent Transportation System (ITS) deployment in the State’s history.NJDOT’s project integrates Ouster BlueCity into the statewide Advanced Traffic Management System (ATMS) for enhanced mobility and safety.

Built to last: Why Ouster BlueCity is a rugged and reliable choice for ITS deployments
Defining a New Era of Durability in ITS. Traditional ITS sensors fail in rain, glare, and snow. Ouster BlueCity uses proven digital lidar to maintain reliable performance at smart intersections 24/7.