

Range is one of the critical metrics for evaluating the performance of lidar sensors. Historically, the majority of lidar sensors have been single-line lidar sensors used for object detection and point-aggregation mapping. Because of this history, range has evolved to describe the maximum detection range of a single channel of a sensor.
The current range metric can help customers understand the maximum range at which a sensor can return points, but as high-resolution lidar is increasingly used for perception and localization, the existing range metric falls short at communicating if there will be enough points for these algorithms to be effective. For applications where many lines of resolution are required to power effective algorithms, range information must be combined with resolution to assess a sensor’s real-world performance.
Object detection is no longer enough
Customers using lower resolution lidar sensors have historically used these sensors to detect major obstacles such as walls, shelving, or pedestrians. These sensors, which usually have between 1 and 16 lines of resolution, allow for very simple algorithms. Usually, the algorithms tell the robot (or in some cases vehicle) to simply stop if the sensor detects an obstacle in close proximity.
Greater levels of robotic autonomy place greater demands on the perception and localization algorithms that drive the robot or vehicle. As the demands of robots increase, they must execute more complex behaviors in more complex and dynamic environments. A residential sidewalk is significantly more challenging for robotic autonomy, for instance, than the inside of a warehouse with a known and unchanging layout.
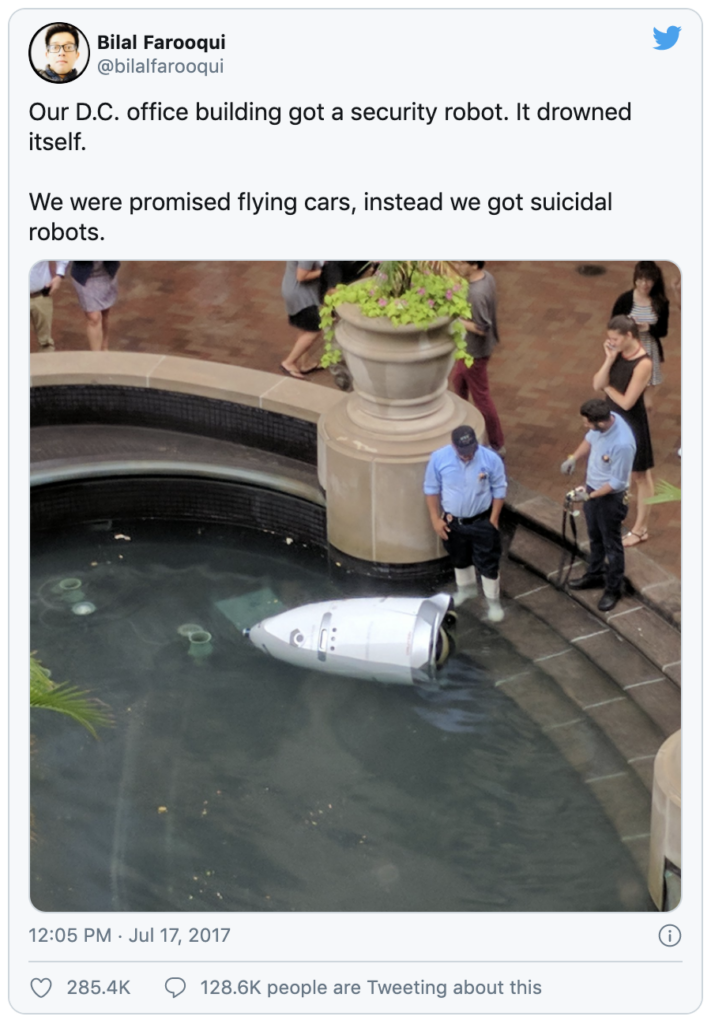
Low-resolution lidar sensors, typically 16 channels or fewer, struggle to meet these new demands because they do not provide enough data to properly segment and classify objects, and they often struggle to reliably detect “negative hazards” that are below ground level. The security robot above – equipped with a low-resolution lidar sensor – met its fate as a result of this sort of below-ground plane hazard.
Effective Range is a better metric
Engineers struggling with the limitations of simple object detection, are turning to high-resolution sensors for more accurate perception and localization. These customers need metrics that communicate more than the raw range of a sensor. They need to know the range at which their algorithms will work reliably and accurately. This is where Effective Range comes in.
Effective Range is the distance at which a sensor can reliably detect a pedestrian. While the ability to detect a pedestrian can vary some based on the algorithm being used for detection, a simple rule can standardize the metric. Based on feedback from our software partners, we define reliable detection as being able to place four horizontal lines of points on a 6 ft (1.8 m) tall pedestrian.
This metric is highly relevant for customers because it helps to define the practical usage range of the sensor, rather than merely the absolute physical range of the sensor.
For some sensors, such as very high resolution flash sensors, the effective range will be limited by the range of their lasers, but for many high resolution sensors, in particular all analog and digital spinning sensors, effective range will be limited by resolution instead of range.
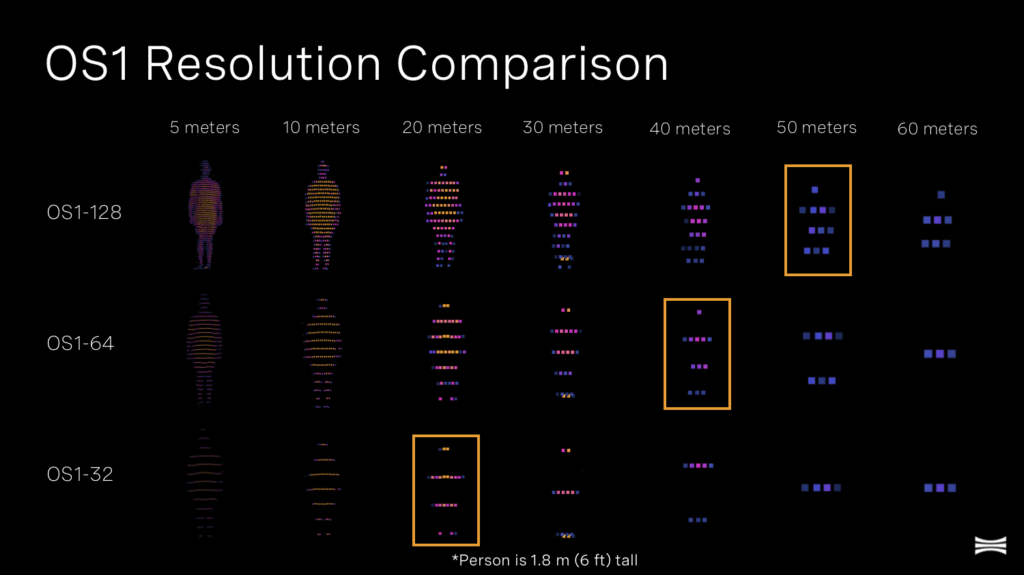
In the image above, you can visually see the difference in effective range between our Gen 2 OS1 lidar sensors. While the absolute range of the OS1-32, OS1-64, and OS1-128 is the same, the Effective Range of the sensors is governed by the resolution differences among the three sensors. The OS1-32’s resolution produces an Effective Range of 20 m, compared to the OS1-128’s effective range of 50 m.
Moving Forward
We recognize that this new Effective Range metric, while an improvement over the historic range measurement, remains overly simplistic to truly measure an algorithm’s maximum performance range. The quality of training data, methods of processing lidar data (e.g. including reflectivity or intensity in algorithms), and horizontal resolution all have an impact on algorithm performance. All of that said, Effective Range is a step forward for customers in helping to better estimate the useful real-world range of a sensor.
We will continue to expand on this concept in the coming months and years, and look out for further assessments of our sensors within this framework.
In our recent webinars, we dive deep into how to understand lidar performance. Our webinars cover:
- Resolution and frame rate
- Range, precision, and accuracy
- Reliability and ruggedness
- Detectors and emitters
If you’d like to learn more about effective range and what it means for your application, please reach out and we’d be happy to talk more.
Related Articles

Unlocking Federal Funding for Smart Infrastructure: Ouster BlueCity with Rev8 Achieves BABA Compliance
Ouster BlueCity with Rev8 has achieved system-level BABA (Build America, Buy America) Act compliance, clearing a major procurement hurdle for state and local transportation agencies pursuing federally funded ITS upgrades. The milestone means Ouster's lidar and edge computing hardware meet domestic manufacturing requirements, making BlueCity eligible for deployment in federally funded intersections, corridors, transit networks, and tolling systems. Combined with Rev8's native color lidar, extended range, and 10-year production life, the announcement positions Ouster BlueCity as a low-friction path to modernizing American roadways.

Privacy by Design: How Ouster BlueCity Fuses Native Color Lidar with Edge Privacy
Ouster BlueCity with Rev8 is the industry's first native color lidar detection system, giving traffic engineers up to 500 feet of advance detection and richer situational awareness at intersections. Its edge-processed AI, running on NVIDIA Orin AGX and trained on 4 million labeled objects across 800 sites, delivers 99% stop bar detection accuracy while automatically blurring pedestrians and cyclists to protect identity.

Setting a new standard in ITS: Ouster BlueCity with Rev8 steals the show at ITS America
Recap from ITS America in Detroit. Ouster BlueCity with Rev8 brings the world's first native color lidar to traffic management, delivering up to 500 feet of multimodal advance detection, with the first deployment streaming from Stamford, CT.