

Ouster provides the eyes of autonomy across industries with our digital lidar sensors. As our network of customers grows, we are listening to our customers to better understand what features will make our high-resolution sensors easier to integrate and use. Firmware 2.3 is all about these ease of use upgrades: more flexibility over the data rate, new real-time sensor data, and additional API commands to query sensor information.
Specifically, Firmware 2.3 provides three important functions. With the latest update, you now have access to:
- New Low Data Rate Profile
- Queryable Sensor Telemetry
- New TCP & HTTP API Commands to query configurations and telemetry
- Additional bug fixes
Firmware 2.3 is available now for all Ouster lidar sensors and can be found on our Downloads page.
Additional Data Profiles:
A high-resolution lidar sensor provides more spatial information, at a cost of higher data volumes. High data output is a challenge in certain applications, for example, industrial applications that have limited compute power. To give our customers more flexibility in working with limited network bandwidth and computing power, we are introducing a low data rate sensor profile. With this new profile, the total data rate will be reduced by more than 70%. As a result, a 128 channel sensor running on the low data rate profile now has the same data rate as a 32 channel sensor running on the standard dual return profile. Take a look at the comparison between our Dual Return Data Packet and Low Data Rate Configuration diagrams below:


We’ve also added a profile for Single Return similar to the Legacy data profile. Legacy mode is still available for those customers who would not want to change their data ingestion code but still want to utilize new firmware features. However, the added Single Return profile will have the updated packet structure that provides more configurable options.
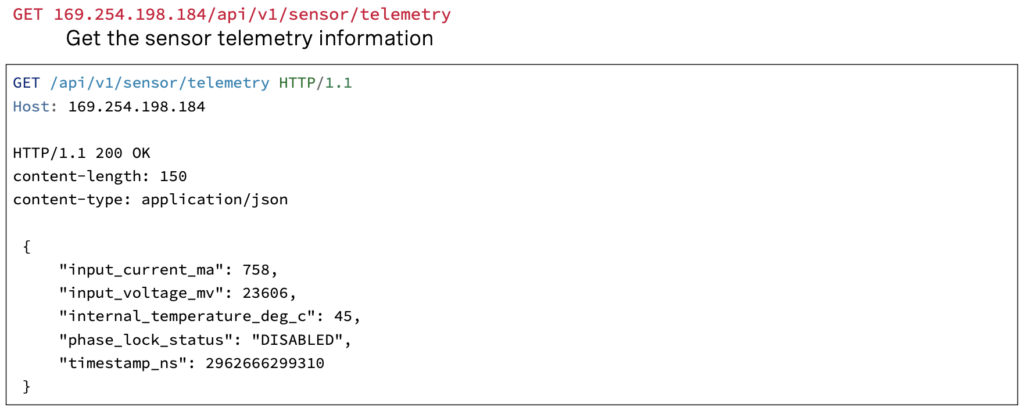
Queryable Sensor Telemetry:
While Ouster firmware provides error alerts and diagnostic data from the sensor after an error has occurred, we have received regular requests for sensor telemetry information to help our customers take preventative action before an error occurs. We’ve been listening, and with firmware v2.3 we are introducing a whole set of queryable sensor telemetry information.
With firmware v2.3, you can now remotely query:
- Timestamp – timestamp of the measurement in nanoseconds
- Lidar input voltage – input voltage that is provided to the sensor
- Lidar input current – input current that is provided to the sensor
- Internal Temperature – internal board temperature (available on Rev 6 and later models)
- Phase lock status – different codes regarding the phase lock status and issues
(please note that these stats are only available on Gen 2 sensors)
This information will enable you to save troubleshooting time by proactively verifying that the sensor is receiving the expected voltage and current, isn’t overheating and is properly synced with other sensors.
In addition to the sensor telemetry information, you can use newly added TCP & HTTP API commands to query alerts, sensor configuration, and more.
In addition to the new firmware, we have also released a new update for our Python SDK that brings support for the new firmware and a few additional features. If you haven’t tried our SDK yet, please head over to our SDK Documentation site to get the latest version. If you already have it installed on your machine, just run pip install –upgrade ouster-sdk.
The updated SDK is bringing a newly improved visualizer that supports keyboard/mouse controls, window and rendering, and drawable object management. It’s also a great tool to assist you in building machine learning applications. For an example project, check out our blog post that demonstrates how to use a computer vision algorithm (YOLOv5) on our lidar data to create a social distancing app. To learn more about the SDK update, visit our release blog here.
Ouster is committed to continuously improving the performance, reliability, and usability of all our sensors through firmware. Please reach out if you have any questions!
Related Articles

Unlocking Federal Funding for Smart Infrastructure: Ouster BlueCity with Rev8 Achieves BABA Compliance
Ouster BlueCity with Rev8 has achieved system-level BABA (Build America, Buy America) Act compliance, clearing a major procurement hurdle for state and local transportation agencies pursuing federally funded ITS upgrades. The milestone means Ouster's lidar and edge computing hardware meet domestic manufacturing requirements, making BlueCity eligible for deployment in federally funded intersections, corridors, transit networks, and tolling systems. Combined with Rev8's native color lidar, extended range, and 10-year production life, the announcement positions Ouster BlueCity as a low-friction path to modernizing American roadways.

Privacy by Design: How Ouster BlueCity Fuses Native Color Lidar with Edge Privacy
Ouster BlueCity with Rev8 is the industry's first native color lidar detection system, giving traffic engineers up to 500 feet of advance detection and richer situational awareness at intersections. Its edge-processed AI, running on NVIDIA Orin AGX and trained on 4 million labeled objects across 800 sites, delivers 99% stop bar detection accuracy while automatically blurring pedestrians and cyclists to protect identity.

Setting a new standard in ITS: Ouster BlueCity with Rev8 steals the show at ITS America
Recap from ITS America in Detroit. Ouster BlueCity with Rev8 brings the world's first native color lidar to traffic management, delivering up to 500 feet of multimodal advance detection, with the first deployment streaming from Stamford, CT.