

Tackle wrong-way driving head on with 3D digital lidar technology
Includes additional insights on stopped vehicle and pedestrian detection
Wrong-way driving (also known as WWD) occurs when a driver operates a vehicle against the intended flow of traffic, creating a highly dangerous situation. Research from the Iowa State University Institute for Transportation revealed that this issue can arise on various types of roads, including highways, freeways, and arterial roads, particularly at off-ramps. Although many serious wrong-way driving incidents occur on highways, it is not uncommon for collisions to also occur on urban intersections and one-way streets. Regardless of the specific circumstances, when a driver mistakenly heads into oncoming traffic, the risk of head-on collisions significantly increases and the driver endangers both themselves and other road users. Fortunately, wrong-way incidents are relatively rare, although the impact of these collisions is often magnified by their circumstances and the high speeds involved. Many wrong-way driving incidents result in fatalities or serious injuries. According to the Federal Highway Administration (FHWA), approximately 500 people died in wrong-way crashes annually in 2019 and 2020 in the United States. The AAA Foundation for Traffic Safety revealed that between 2010 and 2018, wrong-way drivers made up 52.8% of fatalities from accidents, followed by passengers (5.7%) and occupants of other vehicles (41.1%). Data from other countries is relatively limited although research from the National Highways reported that wrong-way driving incidents on England’s motorways rose to almost 900 in the year leading up to June 2023, which was an increase of 102 incidents from the previous year.
What are the main causes of wrong-way driving?
Wrong-way driving incidents can arise from a variety of factors, with the National Transportation Safety Board (NTSB) noting that almost half of wrong-way accidents are caused by drunk drivers. Alcohol and some prescription medications can severely impair a driver’s judgment, coordination, and cognitive abilities, heightening the risk of critical errors such as wrong-way driving incidents. Moreover, age plays a role in incidents, as does an over-reliance on GPS technology, which can mislead drivers in complex traffic situations. The design of roadways, especially divided highways and arterial roads, can further exacerbate confusion, making them particularly prone to wrong-way driving events Detecting and understanding the causes and consequences of wrong-way driving is essential for departments of transportation (DoTs) and highway administrations to develop effective mitigation strategies. Key interventions to prevent wrong-way driving or lessen the severity of related incidents include:
- Modifying road design with improved signage and markings.
- Installing wrong-way driving detection systems.
- Strengthening enforcement efforts.

How is wrong-way driving commonly managed today?
Today, DoTs and highway administrations purchase, install, and maintain intelligent transportation systems (ITS) that can help detect wrong-way drivers, alert drivers of their error via signs, and notify the relevant traffic management center. Wrong-way driving is commonly detected and managed today using a combination of multiple technologies, data sources and strategies, including:
- Detection technologies: Technology like lidar, thermal-based camera detection systems and radar are used to monitor roadways and alert traffic management centers in real-time to wrong-way drivers.
- Traffic signage and smart signals: Wrong-way signs with flashing lights and smart traffic signals adapt to detected traffic patterns to warn and redirect drivers. Data analytics: Traffic management centers analyze data from various aggregated data sources to execute targeted interventions.
- GPS and navigation alerts: Some GPS systems provide drivers with warnings when they are entering one-way streets or traveling in the wrong direction.
These methods work together to enhance detection, improve response times, and ultimately reduce the occurrence of wrong way driving incidents. However, they do come with some challenges.

What are the challenges with wrong-way driving detection systems?
Commonly used wrong-way detection systems face several significant challenges for accurate detection, environmental adaptability, system integration, and data analytics:
- Radar and thermal imaging detection challenges: Radar's lower resolution and limited ability to capture fine details creates challenges as a wrong-way driving solution, especially when distinguishing between closely spaced vehicles on roads. Additionally, as radar’s emitted signals are material-dependent, it is difficult to separate objects with similar reflection characteristics. In contrast, thermal cameras can struggle to detect dark vehicles as their surfaces absorb more heat, resulting in minimal temperature contrast with the environment.
- Environmental limitations: ITS that rely on cameras can struggle in poor lighting, adverse weather, and obstructed fields of view, affecting detection accuracy and leading to high rates of false positives and negatives. As many wrong-way driving collisions happen at night (see following section), it is crucial for detection systems to perform effectively in all lighting conditions.
- Integration and cost issues: Incorporating detection systems into existing infrastructure can be complex and costly, with ongoing maintenance required to ensure system reliability. This maintenance burden can become significant over time.
- Data analytics challenges: Limited data insights regarding wrong-way driving events hinder DoTs and administrations from fully understanding the extent of the problem and developing effective mitigation strategies. Not all incidents are detected or accurately recorded, complicating the analysis of wrong-way driving issues.
Why lidar for wrong-way driving detection?
Compared to other technologies like radar and thermal imaging, digital lidar offers distinct advantages for detecting vehicles involved in wrong-way driving:
- High resolution and range: Digital lidar delivers exceptional high-resolution 3D spatial awareness. By generating detailed 3D point clouds, lidar sensors can capture position, speed and direction of vehicles at long ranges and in near real-time. This capability is advantageous for the early detection of wrong-way drivers, as it allows for timely alerts that can help prevent wrong-way driving crashes.
- Vehicle color and surface agnostic: Lidar is not affected by vehicle color or reflectivity and can effectively detect dark vehicles because it emits its own laser light, allowing it to illuminate the environment regardless of ambient light conditions. Lidar measures distance based on the time it takes for laser pulses to return, allowing it to detect vehicles regardless of their color or surface characteristics.
- High reliability in all lighting conditions: The Special Investigation Report by the National Transportation Safety Board stated that 78 percent of wrong-way collisions occurred between 6:00 p.m. and 6:00 a.m. It is crucial that a wrong-way detection system can handle the most challenging lighting conditions from glaring sun to darkness. Digital lidar sensors work effectively in low light because they use laser beams to actively illuminate the environment. By measuring the time it takes for laser pulses to reflect off objects and return to the sensor, lidar accurately calculates distances regardless of light levels. Lidar's sensitivity to reflections enables the detection of vehicles at considerable ranges, while its resilience against sun glare and shadows helps ensure reliable performance in other lighting conditions.
- Adverse temperatures and weather: Lidar’s ability to generate precise 3D point clouds allows for accurate object detection even in low-visibility situations such as snow, fog or rain. While water droplets can scatter radar waves, lidar's laser beams more effectively penetrate these conditions. Lidar is also less affected by heat distortion, which can interfere with a thermal camera's ability to detect objects in high temperature or humid environments.
Ouster BlueCity performing reliably during a heavy snow storm
How does Ouster BlueCity work for wrong-way driving?
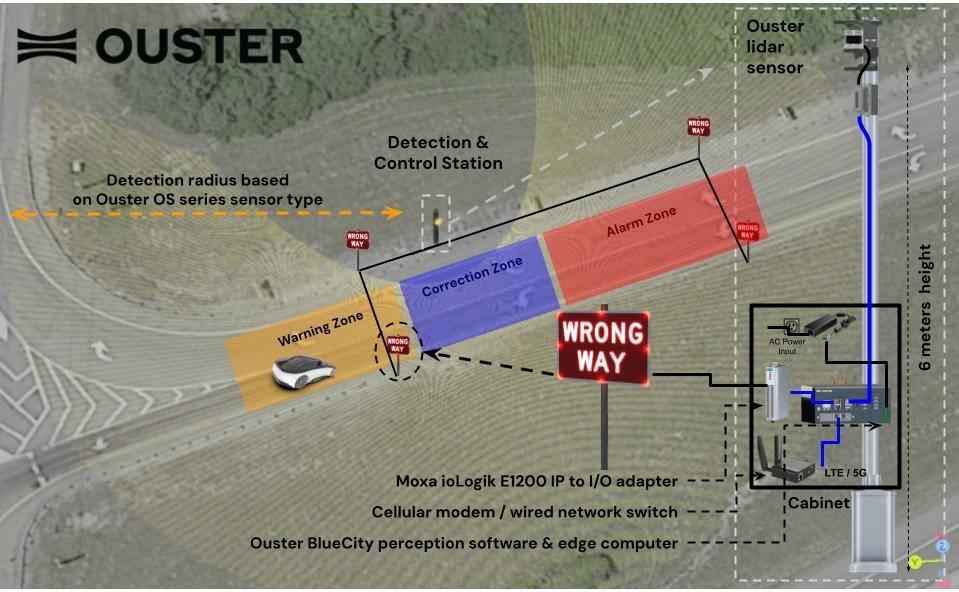
Ouster BlueCity combines high-resolution 3D digital lidars with advanced perception software for traffic actuation and road safety solutions, including wrong-way detection. Upon detecting a wrong-way driver, Ouster BlueCity processes data in near real-time, enabling immediate alerts and recordings. Here’s how it works:
1. Install: A fast and simple installation of Ouster lidar sensors at the beginning of the off-ramp or main line (controlled access highway) enables the detection and tracking of vehicles. Ouster BlueCity is able to classify different types of vehicles and measure speed, trajectory, and location, including the direction of wrong-way drivers. 2. Zone set-up & alerts: Within the Ouster BlueCity user interface, three predetermined detection zones can be created for wrong-way driving, each triggering different actions: i) Warning zone: In the warning zone, the system detects wrong-way drivers and activates a flashing beacon using contact closures or API calls. ii) Correction zone: In the correction zone, the driver might correct the vehicle’s direction after seeing the warning signs. iii) Alarm zone: If the wrong-way driver continues in the wrong direction, a high-priority alert is generated in the alarm zone, triggering the system to send a variable message sign (VMS) or flashing beacon to warn drivers. The alerts are transmitted using dry-contact output and can also be sent to a customer via ATMS to alert authorities. The below image shows the Ouster BlueCity system architecture, including three detection zones:
3. Wrong-way event recordings: Once a wrong-way driver is detected by Ouster BlueCity, a cloud-based 3D event recording and play-back is triggered for post event analysis. Recordings are stored in Ouster Blue City’s web-based user interface and can be used as evidence of a wrong-way event. 4. Integration and scalability: Ouster BlueCity is designed for easy integration and scalable deployments across various off-ramp and main line locations. 5. Data insights: Ouster BlueCity timestamps all wrong-way driving incidents. Customers can download data to generate a histogram of wrong-way driving events over time, including the days or times of events. Additional data insights include the type of road users and speed of vehicles.

How to evaluate Ouster BlueCity for wrong-way vehicle detection
Many DoTs and highway administrations face significant challenges when evaluating wrong-way detection systems. A key barrier is the lack of standardized specifications and testing protocols, which makes it difficult to assess the performance, benefits and limitations of various detection technologies prior to field deployment. Ouster is helping to overcome these challenges by offering a wrong-way driving bundle that includes all of the necessary hardware and software to quickly conduct a proof of concept. In addition, Ouster’s team of dedicated ITS specialists provides solution design, technical assistance, and support throughout the evaluation stage and beyond, helping you scale with ease. To further ensure confidence in your deployment, Ouster BlueCity offers:
- System-level NEMA TS2 certification.
- Buy America(n) certification for OS sensors.
- NDAA compliance.

Get more from your Ouster BlueCity wrong-way driving detection deployment with stopped vehicle and pedestrian detection
Although this blog focuses on wrong-way detection, Ouster BlueCity offers so much more to solve road safety needs. Following an install for wrong-way driving detection on your off-ramps and main-lines, Ouster BlueCity can also address more requirements based on the sensor’s field of view. This may include vehicle counting and speed, and stopped vehicle and pedestrian detection.
What is stopped vehicle detection? Stopped vehicle detection (also referred to as SVD) in ITS refers to a technology that detects vehicles that are stopped, often in dangerous circumstances.. Stopped vehicle detection systems are commonly used in areas prone to accidents, heavy traffic, or areas with frequent stops, such as near highway exits, intersections, or toll booths. These systems play a crucial role in preventing rear-end collisions, reducing congestion, and enhancing the overall efficiency of the transportation network. Once Ouster BlueCity is monitoring your off-ramp or main line, it is also able to provide detection of stopped vehicles or pedestrians outside of vehicles. When a vehicle or pedestrian is detected, the system can trigger immediate alerts to traffic management centers or directly to vehicles (via dynamic message signs or in-vehicle notifications), allowing for quick responses to help prevent accidents or congestion. Data collected can be used to adjust traffic signals, dispatch emergency services, or trigger alerts to inform other drivers of hazardous conditions ahead, improving overall traffic flow and safety. The below recording in Ouster BlueCity demonstrates a stopped vehicle and pedestrian detection event on a busy highway off-ramp. The recording is time stamped and shows the car and pedestrian being accurately detected and classified. The pedestrian is tracked walking down the off-ramp. Following the detection, an alert was automatically triggered along with this event recording to enable authorities to respond promptly.
The Ouster BlueCity wrong-way detection deployment can also detect, classify and track stopped vehicles and pedestrians for improved highway and road safety.
Learn how to solve your road safety & traffic needs
To learn how Ouster BlueCity can help solve your traffic actuation and road safety needs, including wrong way driving and stopped vehicle or pedestrian detection, please reach to speak to one of our ITS experts here.