

The pursuit of vehicle autonomy is revealing many different paths to commercialization. Autonomy will save lives, increase efficiency, and reduce carbon emissions, but making the leap from human operated vehicles directly to autonomously operating robotic vehicles is proving to be difficult. While many companies are working towards a true Level 5 autonomous vehicle, others are now turning to ways to implement autonomous features in a more incremental fashion.
Teleoperation, or teleguidance, is an important new approach for enabling incremental autonomous deployments to occur sooner. So what is teleoperation? It is technology that enables operators to remotely control vehicles via a remote internet connection, allowing vehicles to alternate between autonomous navigation and human controlled navigation. Vehicles can travel autonomously up to the limits of the technology’s capabilities, and have remote operators take over for edge cases. This kind of approach is especially beneficial in safety- and security-purposed vehicles.
Introducing the Research Center of Vehicle Industry
On the vanguard of teleoperation work is the Research Center of Vehicle Industry. Founded in 2011 at the University of Győr in Hungary, the Research Center aims to provide appropriate research and development cooperation between automotive partners and education. The Center’s goal is to bring together industry, researchers, students, government, and the community to support the future of transportation.
Spurred by its industry partners, the Center has recently been working on autonomous driving in general, notably on emergency vehicles, and specifically exploring the use of teleoperation in order to get these vehicles on the road sooner.
Safer teleoperation, powered by digital lidar
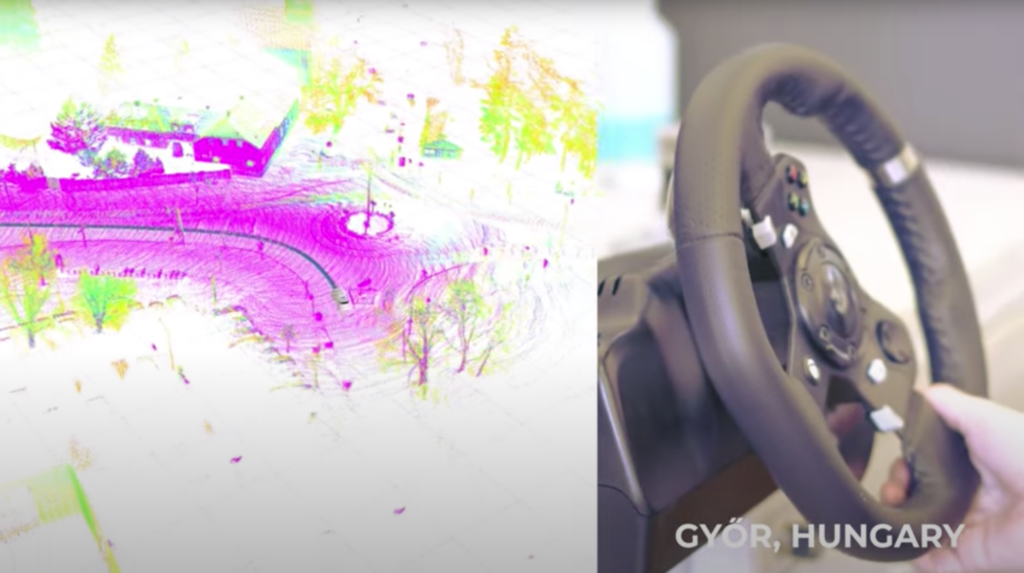
Teleoperation traditionally uses camera images to help the remote human driver navigate the vehicle, but this approach can be challenging for teleoperators. Since teleoperation calls for human intervention in cases when autonomous software fails, this means that humans may be forced to make fast decisions with little context, introducing the risk of mistakes. When a human driver intervenes, they can struggle to quickly gain context of the car’s current scenario.
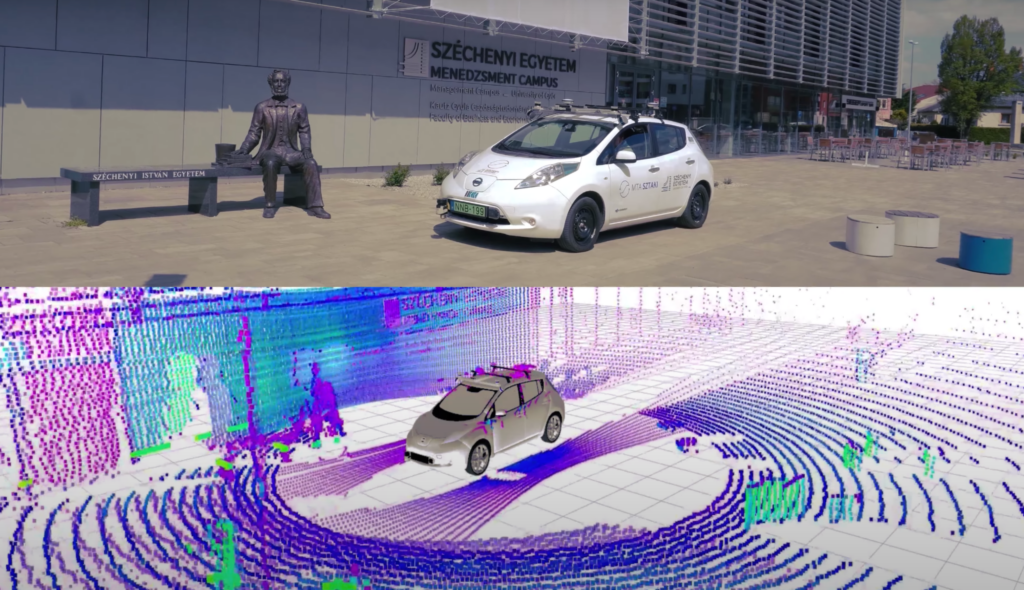
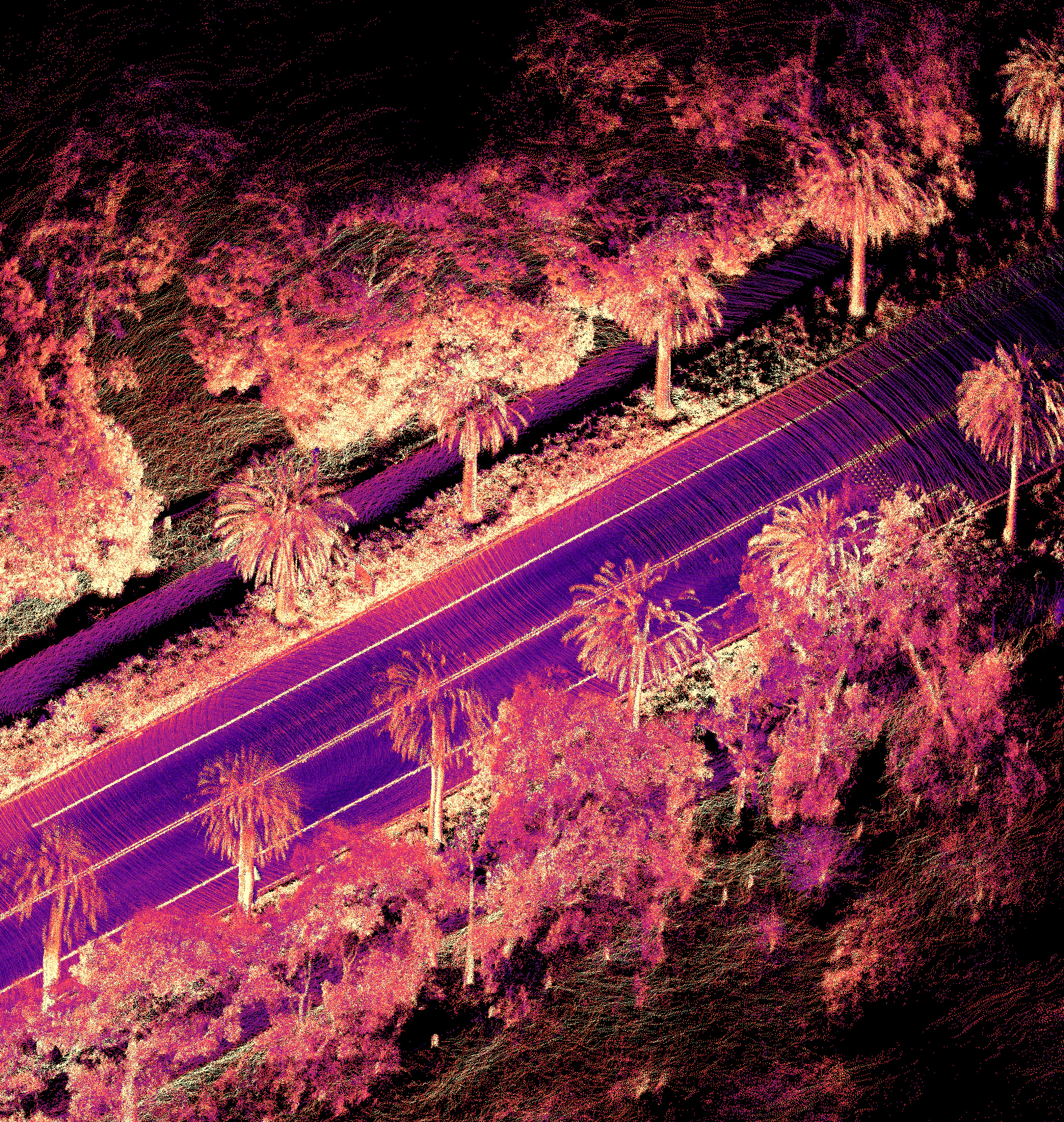
For this reason, the team at the Research Center of Vehicle Industry is investigating the application of lidar sensors to improve the performance of human teleoperators. Lidar sensors provide 3D depth and positional information to the teleoperator about the car’s scenario. By aggregating the data produced by lidar sensors, the teleoperator can use an entire map based on past measurements – providing valuable context that is absent in camera-only approaches. This lidar technology is installed (prototyped) on the Research Center’s Nissan electric test vehicle, and once validated, they intend to deploy the teleoperation system on a light armored safety- and security-purpose vehicle.

The network approach for reliable teleoperation
Teleoperation improves the safety of early autonomous vehicle deployments, but with vehicles more reliant on remote operators, the network connection becomes safety critical. In order to make their system as robust as possible, the team at the Research Center built a multi-channel V2X communication protocol, combined with SLAM algorithms running locally on the vehicle.
V2X refers the a vehicle (“V”) communicating to (“2”) any other object on the road (“X”) – which can include vehicle-to-infrastructure “V2I”, vehicle-to-vehicle ”V2V”, or vehicle-to-network “V2N”. The multi-channel deployment used by the Research Center ensures that the vehicle is not overly dependent upon any single network of communication, ensuring that the teleoperator has reliable access to control the vehicle at all times.
The SLAM algorithm running locally provides an extra layer of safety for the vehicle and the teleoperator. The map created by the SLAM algorithm will give the teleoperator the key spatial context required to safely maneuver the vehicle, and in case of a network failure, the SLAM map can be used to help the vehicle gracefully and safely navigate to a stop.
Robust systems require robust lidar sensors
The team at the Research Center is dedicated to public safety, and in order to ensure a safe and reliable system, the team sought out the most reliable sensors. Ouster lidar sensors play a critical role in the teleoperation system, and were chosen because they are the most reliable sensors on the market. “We had experience with other lidar manufacturers, and we selected Ouster lidar sensors because of their IP69K water resistance, combined with their reliability and usability,” said Ernő Horváth, Research Engineer.

The Research Center’s team is currently iterating on their prototype vehicle as they move toward a full deployment of their teleoperation system on armored safety vehicles. We will be watching their progress and look forward to supporting the bright future ahead for teleoperation deployments across the globe.
Related Articles

Built to last: Why Ouster BlueCity is a rugged and reliable choice for ITS deployments
Defining a New Era of Durability in ITS

Introducing the REV8 OS Family: The World’s First Native Color Lidar
A new generation of Ouster digital lidar, powered by custom L4 Ouster Silicon. Rev8 introduces native color lidar, provides up to double the range and resolution, and is designed for functional safety, reliability, affordability, and scale.
Freie Universität: High-Precision, Small-Footprint Mapping
Researchers at Freie Universität Berlin are changing a storage paradigm for autonomous navigation. By using Ouster OS2 digital lidar to create ultra-lightweight bird's-eye-view maps, the team achieved sub-50cm localization accuracy with a map footprint of just 4 MB per square kilometer.