

Firmware 3.1: Improved all-weather performance, zero minimum range, and improved accuracy
We are proud to announce the release of Firmware 3.1 for Rev7 sensors. We first released our Rev7 sensors nearly 18 months ago, doubling sensor range, greatly improving precision, and adding the OSDome to our product lineup. Firmware 3.1 builds on the major performance improvements of Rev7 with: reduced minimum range, improved accuracy, improved point cloud performance with obscurants (rain, dust, fog, and snow), as well as many usability and feature additions. Firmware 3.1 is available on all Rev7 OSDome’s, OS0’s, and OS1’s
Minimum range of ZERO
The biggest change coming with Firmware 3.1 is a major reduction of the minimum range of the sensor from 50 cm to 0 cm. We now offer three minimum range configuration options: 50 cm, 30 cm, and 0 cm. With a configuration of 0 cm, you will receive points for objects, all the way up to the window of the sensor.
To show off this feature, we put the sensor through an extreme close parking scenario. In the demonstration below, you can see the sensor mounted on the front of a car being driven all the way up to a brick wall. There are two key parts of the video to note: (1) is the true zero minimum range, maintaining clear visibility of the wall all the way up to the window of the sensors, and (2) is the straightness of the wall - you only begin to see minor distortion (~1 cm) in the plane of the wall when the sensor is about 15 cm away.

Higher Accuracy
Along with the minimum range improvement, we’ve made major improvements to our accuracy in Firmware 3.1. Increasing our accuracy was no small feat, the changes to our laser processing required us to move from nanosecond to picosecond-level measurement. That’s down to trillionths of a second. The accuracy improvements are across all targets and ranges, but are greatest in the near range, and on bright objects or retroreflectors. In the graphic below, you can see what a flat 90% reflective target (eg. a bright white wall) looks like as a sensor approaches it from 3m all the way up to the window of the sensor. The yellow/orange points represent the lidar returns while the darker blue points represent the true ground truth of the object.

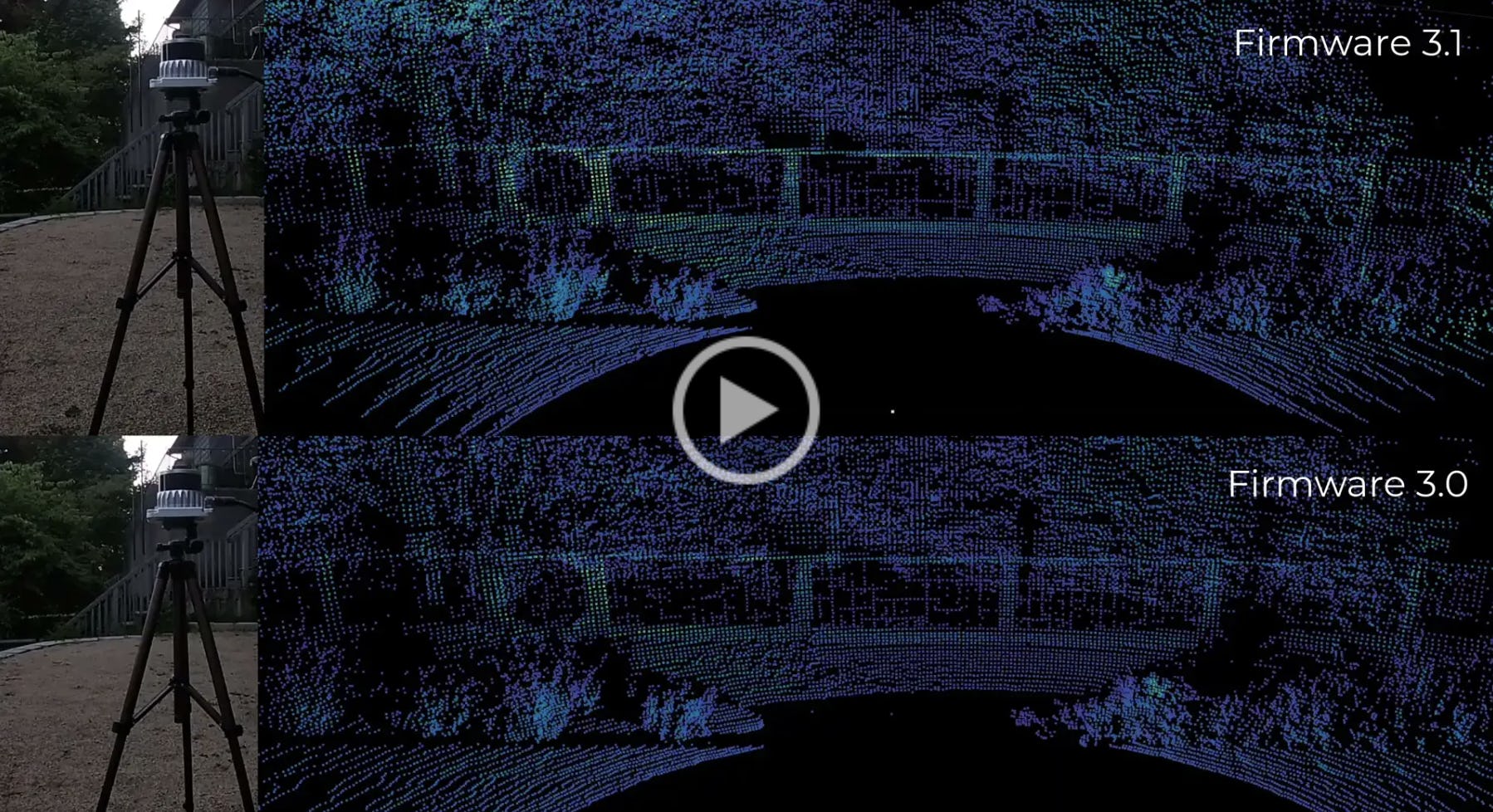
Improved Obscurant Performance
The major advancements to near-range detection in Firmware 3.1 significantly improve how the sensor handles obstructions on the sensor window. While dust or water will always partially obscure a sensor's view, Ouster sensors now maintain better visibility in these conditions. In the example below, heavy water spray on the sensor window clearly demonstrates the difference between Firmware 3.0 and 3.1. Notice how Firmware 3.1 maintains visibility of the near-range ground points at the right and left edges of the recording while the sensor running Firmware 3.0 is partially blinded.


We will follow up with a slightly longer post on this topic, but as a preview, we also took a sensor on FW3.1 for a drive in the rain. Here’s a comparison of the lidar performance vs. a camera on the drive:
Additional Features:
Return Sorting
In FW3.1, we have added a few features to make the sensor easier to use. The most significant of these new features is a new return ordering capability. All Rev7 sensors have the ability to collect up to a maximum of two returns for each point. Now, in the Sensor Web Interface, you can configure the order of these returns. By default, in dual return mode, Ouster sensors will send the strongest and second strongest returns, meaning in the path of the laser, the two objects that reflect the most light will be returned by the sensor. In single return mode, the strongest return is selected by default.
You will now have three options for ordering these returns:
Strongest to Weakest (whichever of the two returns reflected more light will be the ‘first’ return)
Nearest to Farthest (whichever of the two returns is closer to the sensor will be the ‘first’ return)
Farthest to Nearest (whichever of the two returns is farthest from the sensor will be the ‘first’ return)
These options are visualized here:

In addition to Return Ordering, we have three additional areas of feature improvement in FW3.1. They are:
FuSa low data rate dual return packet. This offers users the ability to use dual return data in a low data rate mode.
Improved data integrity with End-to-end CRC that covers the entire data packet.
User Integration improvements with alert flags in the data packet, a new customizable data field, and configurable scale for the IMU.
Firmware 3.1 is a major firmware improvement to our sensors. You can read more about the technical details of these features in our Changelog and in the Firmware Feature Guides.
We would like to remind our customers that TCP commands to the sensor will be fully deprecated in future Firmware releases and to please transition to the HTTP API as soon as possible.
We strongly encourage all Rev7 customers to upgrade their sensors to Firmware 3.1 as soon as possible to get the highest performance possible out of their sensors.
Related Articles

Privacy by Design: How Ouster BlueCity Fuses Native Color Lidar with Edge Privacy
Ouster BlueCity with Rev8 is the industry's first native color lidar detection system, giving traffic engineers up to 500 feet of advance detection and richer situational awareness at intersections. Its edge-processed AI, running on NVIDIA Orin AGX and trained on 4 million labeled objects across 800 sites, delivers 99% stop bar detection accuracy while automatically blurring pedestrians and cyclists to protect identity.

NJDOT
Ouster BlueCity to be deployed at 42 urban highway locations covering mainline and ramps close to the MetLife Stadium The deployments are part of New Jersey Department of Transportation’s (NJDOT) project representing the largest and fastest Intelligent Transportation System (ITS) deployment in the State’s history.NJDOT’s project integrates Ouster BlueCity into the statewide Advanced Traffic Management System (ATMS) for enhanced mobility and safety.

Built to last: Why Ouster BlueCity is a rugged and reliable choice for ITS deployments
Defining a New Era of Durability in ITS. Traditional ITS sensors fail in rain, glare, and snow. Ouster BlueCity uses proven digital lidar to maintain reliable performance at smart intersections 24/7.