

Firmware 3.2: New Features & Improved Data Quality
Inside the update: native 3D Zone Monitoring, advanced Window Blockage Detection, and Synchronous IMU. Enhance SLAM accuracy and offload compute requirements with edge-processing.
We are proud to announce the release of Firmware 3.2 for Ouster sensors. This release introduces significant upgrades to edge processing capabilities, data quality, and ease of integration. Firmware 3.2 builds on the major performance improvements of our recent hardware generations with a new standalone 3D Zone Monitor, advanced blockage detection for dirty environments, synchronous IMU streams, and a modernized Web UI.
Top Feature Updates
3D Zone Monitor
The most significant change in Firmware 3.2 is the introduction of a new 3D Zone Monitoring system. This feature supports basic on-sensor object occupancy and vacancy detection, allowing users to configure and monitor multiple 3D zones directly on the lidar sensor. The sensor monitors these zones without the need for extra compute or software.
- Define up to 128 3D zones of any shape or size, actively monitor 16 at a time
- Rapidly switch between active zones based on speed and steering
- Configurable zone trigger thresholds based on point count, frame count and mode (occupancy or vacancy)
- Get live zone statistics
- Functions independently or in conjunction with other point cloud operations
Ouster SDK 0.16.0 (generally available) and newer versions provide full support to read/write zone configurations and visualize states over time.
A forklift with custom zones stops based on pallet detection.
Window Blockage Detection
To instantly detect and monitor physical obstructions on the sensor's optical window, FW3.2 introduces a new Window Blockage Detection feature. A new 8-bit Window data field provides granular data regarding the state of the sensor window.
- Obscurant Classification: The window data field distinguishes between water droplets, low-reflectivity smudges (e.g., mud), and high-reflectivity blockages (e.g., electrical tape).
- Proactive Maintenance: Systems can use Window data to self-diagnose blind spots caused by environmental factors and trigger cleaning cycles or maintenance stops.
See Sample Data on Ouster Studio:
- Sensor window blocked by mud
- Sensor window blocked by water droplets
- Sensor window blocked by white tape
Precision SLAM with Synchronous IMU
Firmware 3.2 delivers synchronized IMU data and an increased sampling rate, providing a higher frequency of IMU samples that are readily time-synced with the lidar data. This solves one of the most common pain points in lidar-based navigation: distortion in the lidar point cloud when the sensor is in motion.
- Increase in sampling rate: 640 Hz IMU data to deskew lidar packets within a single frame.
- Packet adjustment: The default IMU packets per frame have been adjusted to 8 to optimize data flow and are deterministically interleaved between lidar packets.
To learn more, read the Ouster community post: Optimal Sensor and SLAM Configuration for "Crisp" Mapping, and try it out yourself by downloading the San Francisco Ferry Building sample dataset on Ouster Studio.
Data Quality & Signal Processing
Significant updates have been made to the signal processing pipeline to ensure cleaner, more accurate point clouds.
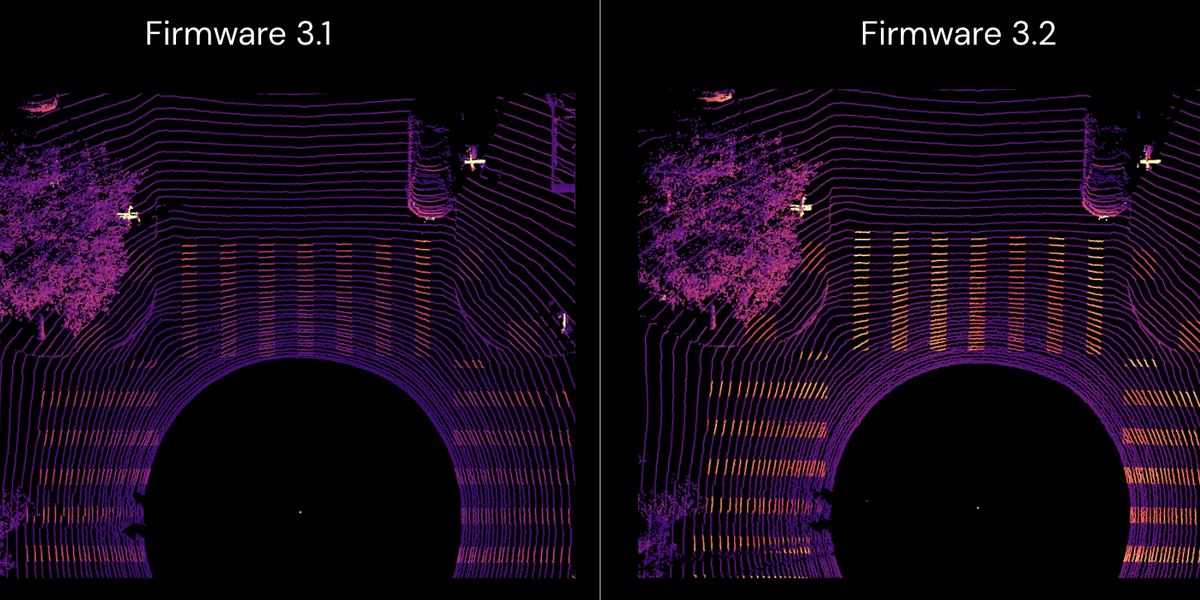
- Bloom Reduction: Substantial improvements to point cloud performance to reduce false positives/negatives near retro-reflective objects such as street signs and safety vests.
- Calibrated Reflectivity: Accuracy and uniformity have been improved ensuring consistent CalRef values across the entire range.
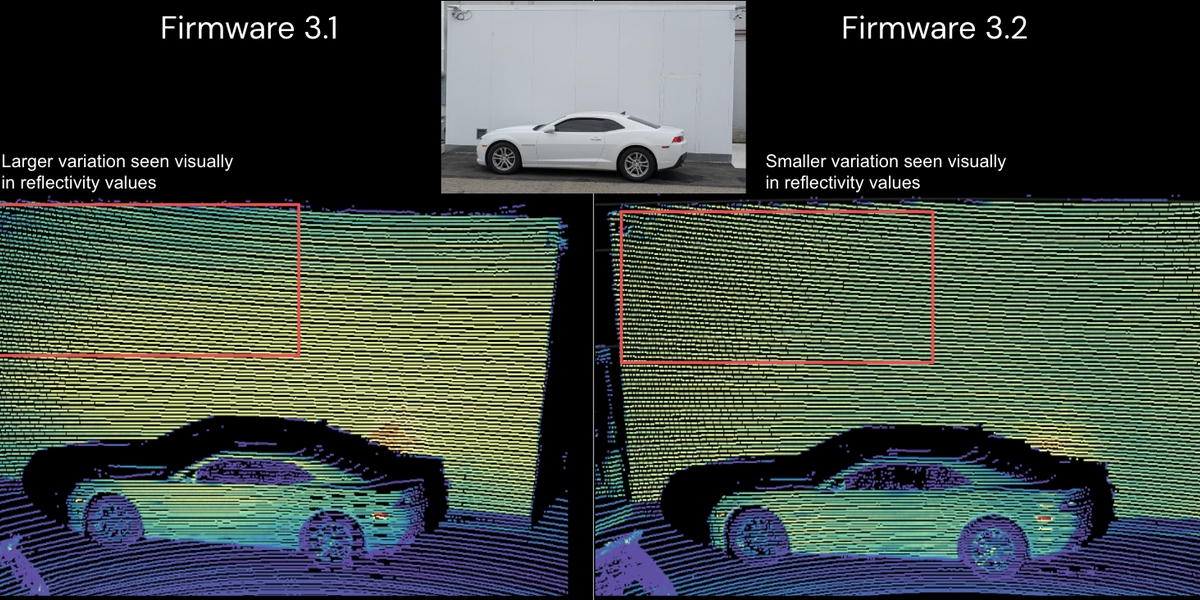
Improved Uniformity in Calibrated Reflectivity
Other Updates: Firmware 3.2
Important Notice: Support for the legacy TCP command server has been officially dropped. All customers must transition to the HTTP API as soon as possible. Additionally, please note the inclusion of the $ character in the HTTP endpoint syntax is a breaking change for NMEA users.
Building on the major feature updates, Firmware 3.2 introduces several enhancements designed to streamline integration and improve system resilience for large-scale deployments.
Usability & Integration
- Modernized Web UI: A comprehensive redesign of the operator interface makes configuration faster and more accessible, including new visibility for configuration states.
- OpenAPI Support: The sensor now includes the OpenAPI v3.1.1 specification on-device, standardizing the REST API for seamless programmatic integration.
- Hardware Identification: Using Input-only MIO, users can now query high/low input levels on MIO pins to automatically identify sensor hardware locations (e.g., front-left vs. rear-right) via the wiring harness.
- User Editable Data (UED): A new free-text field in the Web UI allows customers to store permanent contextual data, such as license keys or asset tags, directly on the sensor.
Reliability & Networking
- System Resilience: This update includes graceful thermal shutdown recovery sequences and auto-reinitialization to recover automatically from communication failures.
- Networking Enhancements: Full support for Multicast routing (TTL > 1) and static IP Default Gateways simplifies integration into complex network topologies.
Fixes & Improvements
- Graceful Thermal Shutdown: Implemented full recovery sequences for thermal shutdowns.
- Uplink Recovery: Implemented auto-reinitialization to recover automatically from communication failures.
- Security: Comprehensive security hardening includes firewall configurations and Mixed Content security fixes for the Web UI.
Firmware 3.2 represents a major leap in edge-processing capabilities for our sensors. We strongly encourage all customers to upgrade to Firmware 3.2 to take advantage of the new features and improvements.
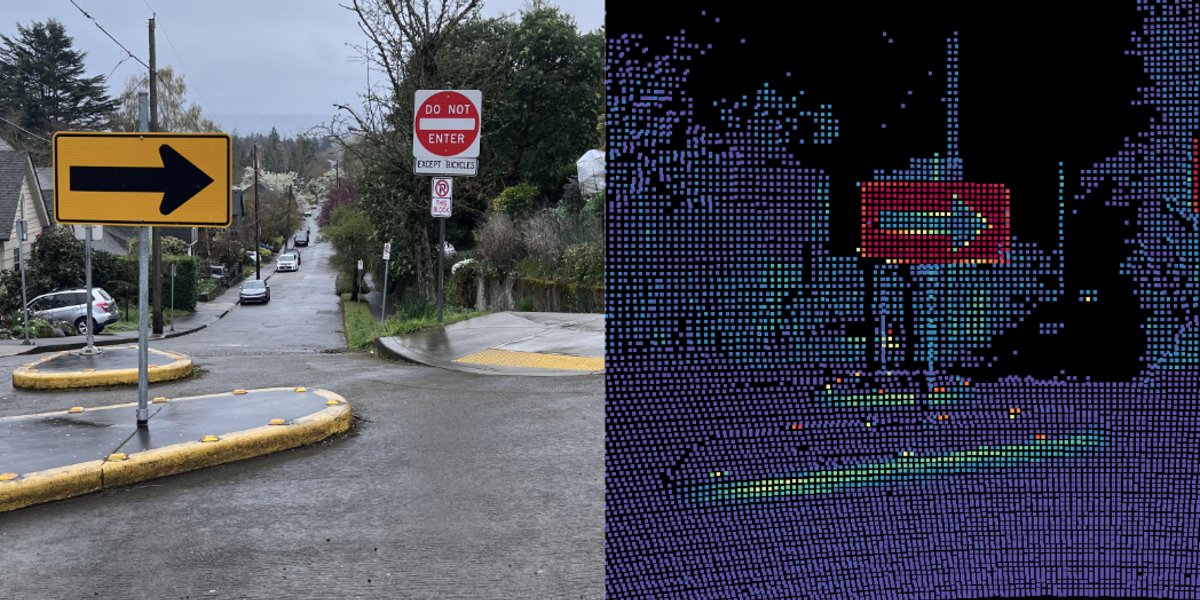
Image and its output with Firmware 3.2