
Zero to SLAM in 30 minutes: an interactive workshop
In this workshop, SLAM experts Juan Wee and Krishtof Korda do a live demonstration of getting up and running with SLAM using Kudan.
On-demand Webinar
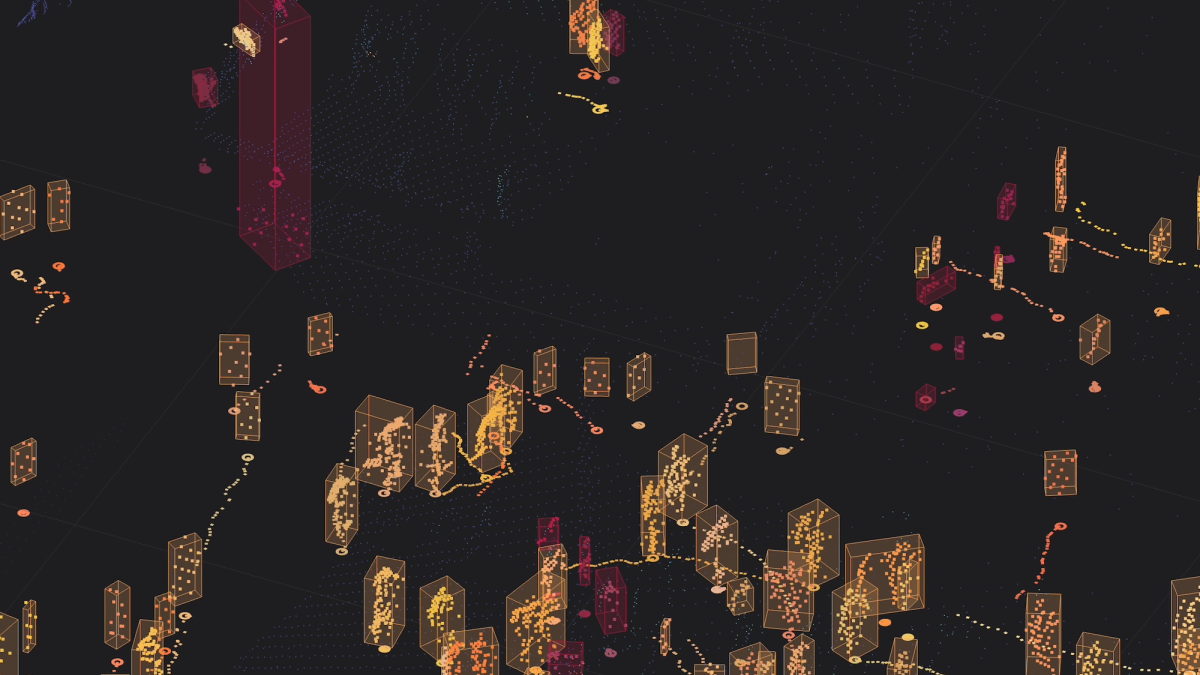
Autonomous machines and vehicles rely on Simultaneous Localization and Mapping (SLAM) software to build a map of their environment, and understand their position and orientation within that space at any given moment. However, setting up and evaluating SLAM can be a tedious, months-long endeavor. With Kudan Lidar SLAM, you can now jumpstart your evaluation of Ouster lidar with a commercial-grade SLAM in a matter of minutes.
In this workshop, SLAM experts Juan Wee and Krishtof Korda do a live demonstration of getting up and running with SLAM using Kudan.
What we cover:
- Setting up and getting started with Kudan Lidar SLAM with Ouster data
- How to effectively evaluate SLAM
- Moving from SLAM evaluation to development
What you’ll need to follow along:
- Ubuntu 18.04 or Ubuntu 20.04
- Optional: Set up ROS on your system with ROS Melodic (Ubuntu 18.04) or ROS Noetic (Ubuntu 20.04)
- All attendees will receive free evaluation software of Kudan Lidar SLAM and a sample data file from Ouster
- You do not need an Ouster sensor to participate!
Kudan is an artificial perception research and development company that specializes in SLAM solutions for various industries, including automotive, robotics, and mobile mapping applications.